 |
|---|
Unidade Curricular
Pretende-se que os alunos dominem efetivamente os conceitos e técnicas fundamentais da computação gráfica 2D e 3D.
Para os gráficos 2D são desenvolvidos temas como primitivas de desenho procedimental e gráficos vetoriais, transformações e técnicas de animação. Nos gráficos 3D são tratados os grafos de cena, pontos de vista, geometria e aspeto, transformações, iluminação e animação.
Os conceitos e técnicas são transmitidos no contexto da web, usando as tecnologias mais recentes deste domínio.
Usos de IA e outros Sistemas Informáticos
- É encorajado o uso de sistemas de IA nesta unidade curricular como apoio técnico, analítico e de aprendizagem.
- É aconselhada uma atitude cética, analítica e inquiridora em relação aos resultados obtidos por esses sistemas:
- “Isto está certo?”,
- “Como e porque é que funciona?”,
- “Quais são as partes importantes?”
- “E agora, já consigo fazer isto por mim, sem este apoio?”
- Todas as respostas e todos os trabalhos são sempre da responsabilidade exclusiva e total do aluno que os apresenta.
É proibido o uso destes sistemas durante qualquer elemento de avaliação, para qualquer efeito.
O seu uso, se detetado, dá origem imediata à anulação da avaliação, comunicação da ocorrência à direção da escola e será considerada violação da integridade académica, sujeita às penalizações previstas no Artigo 119.º do Regulamento Académico (veja este aviso sobre plágios e fraudes).
Programa
| Capítulo | Sumário |
|---|---|
| Introdução | Sobre a Computação Gráfica. |
| Gráficos 2D | Introdução 2D, Geometria, Transformações. |
| Aspeto, Exemplos, Revisões. | |
| Gráficos 3D | Introdução 3D, Geometria. |
| Transformações, Aspeto. | |
| Exemplos 3D. | |
| Animação | Animação por Tempo e por Passos. |
| Exemplos & Aplicações | Gerador SVG em javascript. |
| Sistemas-L (C2D). | |
| Animação 2D (C2D + SVG). | |
| Geometria, Aspeto, Animação (X3D). |
Avaliação
 |
|---|
- A avaliação de Computação Gráfica tem uma componente teórica e uma componente prática.
- A componente teórica pode ser realizada por exame, ou por testes (ie frequências).
- A componente prática consiste na realização de quatro trabalhos dentro do processo e condições indicadas a seguir.
- Os exames correspondem apenas à componente teórica da avaliação.
- Se reprovar no exame normal pode fazer o exame de recurso.
- Veja as datas das provas nos anúncios do moodle.
Provas Orais — Em casos individuais que o docente ache necessário, pode ser realizada uma prova oral.
Componente Teórica
- A componente teórica vale 60% da nota final (12 valores).
- Cada teste vale 20% da nota final (4 valores).
- Pode realizar os testes que desejar e também os exames (normal e de recurso).
- A nota final desta componente é a combinação mais vantajosa que resulta dos testes e dos exames.
- Exemplo 01. Testes: 03, 03, NA; Exame: 11; Nota final: 11.
- Exemplo 02. Testes: 04, 03, 03; Exame: 08; Nota final: 10.
- Exemplo 03. Testes: 04, NA, 04; Exame: NA; Nota final: 08.
Componente Prática
- A componente prática vale 40% da nota final (8 valores).
- Cada trabalho conta 10% da nota final (2 valores).
- Cada trabalho corresponde a uma das tecnologias:
SVG,C2D,X3De3JS. - A componente prática não tem «recurso».
- A classificação de cada trabalho é calculada segundo os Critérios de Avaliação dos Trabalhos Práticos.
Todos os trabalhos terão de ser entregues até à data do «Exame Normal».
Critérios de Avaliação dos Trabalhos Práticos
| Critério | Descrição | Peso |
|---|---|---|
| apresentação | encoding, comportamento, página, início, etc. | 4% |
| fidelidade | em relação ao tema e à proposta. | 6% |
| organização/separação | ficheiros e diretorias para estilos, código, média, etc. | 10% |
| organização/código | classes, funções e estruturas de dados adequadas, não redundantes. | 10% |
| organização/grafo de cena | hierarquia de objetos gráficos, espaços do objeto/mundo. | 10% |
| modelação/geometria e aspeto básicos | quadrados, caixas, círculos, esferas, etc. | 5% |
| modelação/transformações | translação, rotação, escala, composição. | 10% |
| modelação/geometria construída | caminhos, segmentos, faces, extrusões. | 15% |
| modelação/aspeto construído | gradientes, mosaicos, mapas de cores, mapas UV. | 15% |
| modelação/animação | por passos, eventos internos e externos (eg colisões, teclado). | 15% |
Note bem o peso de cada componente da avaliação!
Aviso sobre Plágio ou Fraude
Fraude: Todo o comportamento do estudante em provas ou elementos de avaliação suscetível de desvirtuar o resultado da prova e adotado com a intenção de favorecer intencionalmente o próprio ou terceiros.
-
A fraude ou plágio cometidos em qualquer elemento de avaliação implica a anulação da prova e do seu resultado, sem prejuízo de eventual instauração de procedimento disciplinar.
-
São sanções aplicáveis às infrações disciplinares dos estudantes, de acordo com a sua gravidade:
- A advertência;
- A multa;
- A suspensão temporária das atividades escolares;
- A suspensão da avaliação escolar durante um ano;
- A interdição da frequência da instituição até cinco anos.
Referências
- Regulamento Académico da Universidade de Évora
- Regime jurídico das instituições de ensino superior
- Regulamento Disciplinar dos Estudantes da Universidade de Évora
Bibliografia
- João Madeiras Pereira, João Brisson, António Coelho, Alfredo Ferreira, Mário Rui Gomes - Introdução à Computação Gráfica (2019).
- Marschner, S., Shirley, P. - Fundamentals of Computer Graphics (2016).
- Hughes J.F., et al. - Computer graphics. Principles and practice (2014).
- Ammeraal, L., Zhang, K. - Computer Graphics for Java Programmers (2007).
Introdução
Conceitos Fundamentais
Processo da Computação Gráfica
- Modelação: Especificação do modelo gráfico.
- Grafo de Cena: Estrutura de dados que define e organiza o modelo gráfico.
- Programação gráfica: Uso de uma linguagem de programação, ou um documento, para descrever o grafo de cena.
- Construção: Transformação do modelo gráfico numa imagem.
Definição e Disciplinas Relacionadas.
- Computação Gráfica: É o estudo e aplicação das técnicas de modelação, processamento e construção de objetos gráficos em computadores.
- Visão Artificial: É o oposto da computação gráfica: procura reconstruir um modelo (virtual) a partir de imagens reais.
- Programação de Jogos: É uma aplicação da computação gráfica: usa um modelo (virtual) onde o utilizador interage.
- Processamento de Imagem: Tem técnicas para:
- Melhoramento de imagem (equalização do histograma, etc).
- Compressão de imagem.
- Deteção de features: arestas,super-pixeis, etc..
- Resolver crimes (CSI).
- Álgebra Linear: Proporciona as bases formais e numéricas para a CG.
Modelação
A modelação consiste em especificar o modelo gráfico que define a imagem.
-
Espaço do Modelo: É um espaço 2D ou 3D onde é definido o modelo, juntando e organizando vários objetos gráficos - nos espaços 3D os problemas são mais complexos e tratados de forma significativamente diferente dos espaços 2D.
-
Objetos Gráficos: Entidades geométricas (linhas, superfícies) ou luzes, textos, imagens.
-
Representações Matemáticas: Permitem definir e transformar os objetos gráficos.
-
Vistas: Mostram um modelo numa perspetiva específica e enquadram o passo da construção
- Os modelos 2D têm vistas relativamente simples.
- Para modelos 3D é necessário ter em conta inúmeras propriedades que envolvem a câmara, a iluminação, entre outras.
Grafo de Cena
O Grafo de Cena é a estrutura de dados que define o modelo gráfico.
--- config: theme: neutral --- flowchart TD; scene([scene]) --> person([person]) person --> head([head]) person --> body([body]) person --> arms([arms]) person --> legs([legs]) head --> leye([left eye]) head --> reye([right eye]) head --> mouth([mouth]) arms --> larm([left arm]) arms --> rarm([right arm]) legs --> lleg([left leg]) legs --> rleg([right leg])
Além do “simples” desenho de objetos, interessa definir um modelo onde os objetos são colocados e geridos. O grafo de cena organiza os vários objetos gráficos numa única estrutura de dados que “alimenta” a rotina de rendering.
Programação Gráfica
A programação gráfica consiste em especificar um modelo (i.e. um grafo de cena), usando um programa ou um documento.
-
Iniciar o modelo:
- Colocar e ligar objetos gráficos.
- Definir vistas.
-
Evoluir o modelo:
- Remover e/ou acrescentar novos objetos.
- Alterar atributos (posições, …).
Construção
Construção (ou Rendering) é o processo computacional que transforma um modelo gráfico numa imagem exibida num dispositivo físico.
A construção pode ser feita de dois “modos” distintos:
- Modo Retido: O modelo é definido e depois a imagem é construída.
- Modo Imediato: Os objetos são imediatamente desenhados.
Outros Aspetos da Computação Gráfica
-
Problemas:
- Oclusão: o que está “à frente” e o que “fica tapado”?
- Colocação: posição, rotação, tamanho.
- Aspeto: cores, texturas, iluminação, sombras.
- etc.
-
Hardware: Ecrãs, Impressoras, Plotters, Projetores holográficos, etc.
-
Animação:
- Filmes: uma sequência de imagens.
- Jogos: uma sequência de imagens, com interação.
- Simulações: uma sequência de imagens, seguindo as “leis de um sistema”.
-
Interação: Teclados e Ratos, Rede, Interfaces Gráficos, etc.
Aplicações
Filmes
 |
|---|
| Filme “Avatar” |
Jogos
 |
|---|
| Jogo “Starcraft” |
Visualização
 |
|---|
| Fractal |
Simulação
 |
|---|
| Aerodinâmica |
Estatística
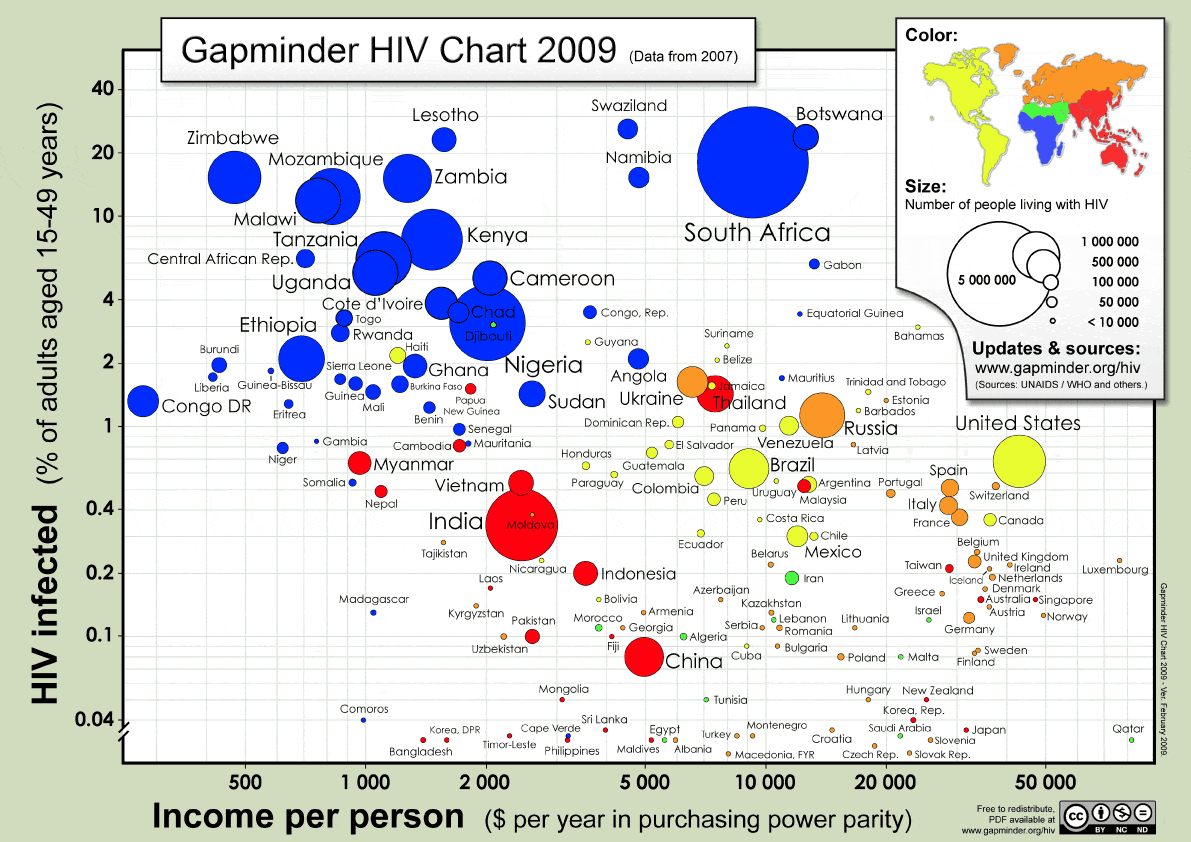 |
|---|
| Gapminder |
Medicina
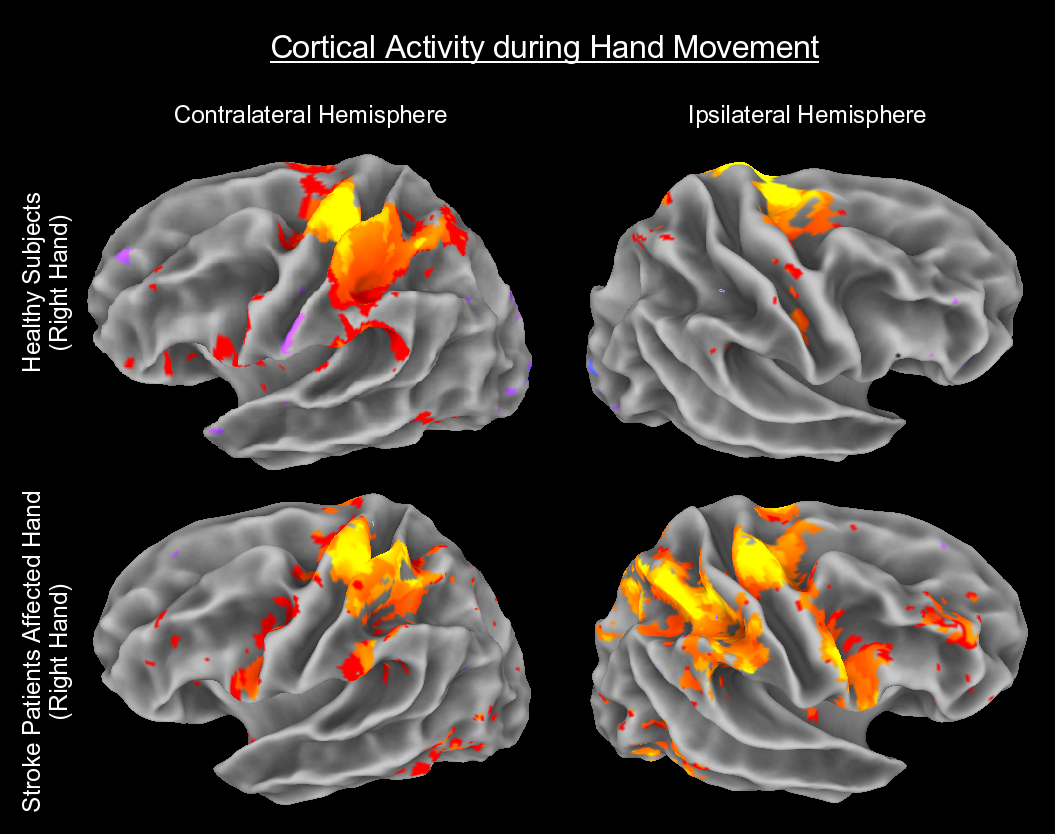 |
|---|
| Ressonância Magnética |
Computação Gráfica na Web
A Computação Gráfica na web proporciona:
- Normas Abertas com ecossistema enorme:
- Aplicações, Ferramentas.
- Informação, Comunidade.
- Paradigmas modernos de descrição de dados e de programação.
- Suporte para gráficos 2D (
canvas,svg, etc) e 3D (x3dom,three.js, etc).
Web 2D
Os elementos canvas e svg:
-
São elementos
HTMLpara gráficos 2D (e 3D). -
Proporcionam ferramentas para modelar:
- Figuras Geométricas, Texto, Imagens.
- Transparências, Gradientes, Transformações, Glifos.
Web 3D
- O elemento
x3dé usado para integrar conteúdo 3D diretamente num documentohtml, sem extensões. - A biblioteca
threejsusa o elementocanvascom contextowebglpermite o rendering de gráficos 2D e 3D, sem extensões.
Exemplos elementares
Contexto 2D
<canvas id="cg:exemplos:c2d" width="256" height="128" />
<script>
const gc = document.getElementById("cg:exemplos:c2d").getContext("2d");
gc.fillStyle = "steelblue";
gc.fillRect(64, 32, 128, 64);
</script>
SVG
<svg
width = "256"
height = "128">
<rect
x = "64" y = "32"
width = "128" height = "64"
style = "fill:steelblue"></rect>
</svg>
ThreeJS
<div id="gc:exemplos:3js"></div>
<script>
import * as THREE from 'three';
import { OrbitControls } from 'three/addons/controls/OrbitControls.js';
const renderer = new THREE.WebGLRenderer( {alpha: true} );
renderer.setSize(256, 256);
renderer.setClearColor( 0xffffff, 0);
const container = document.getElementById("gc:exemplos:3js")
container.appendChild(renderer.domElement);
const scene = new THREE.Scene();
const camera = new THREE.PerspectiveCamera(
35, // abertura
500/500, // proporção largura/altura
0.1, // corte perto
10000 // corte longe
);
camera.position.set( -2.5, 0, 20 );
camera.lookAt( scene.position );
const geometry = new THREE.BoxGeometry( 5, 5, 5 );
const material = new THREE.MeshLambertMaterial( {color: "steelblue"} );
const mesh = new THREE.Mesh( geometry, material );
scene.add( mesh );
const light = new THREE.AmbientLight( "white" );
scene.add( light );
function animate() {
mesh.rotation.x += 0.005;
mesh.rotation.y += 0.005;
renderer.render(scene, camera);
requestAnimationFrame(animate);
}
animate();
</script>
X3D
<X3D
width = "256px"
height = "256px">
<Scene>
<Shape>
<Appearance>
<TwoSidedMaterial
diffuseColor = "steelblue">
</TwoSidedMaterial>
</Appearance>
<Box></Box>
</Shape>
</Scene>
</X3D>
Gráficos 2D
 |
|---|
| Clown, Cavalo, Salamandra, Amadeu de Souza Cardoso |
Conceitos Fundamentais 2D
Na computação gráfica 2D, tanto os espaços dos objetos (onde são definidos os objetos gráficos) como o espaço do modelo (onde é definido o modelo) são 2D (isto é, planos).
Modelação. O processo de modelação é relativamente simples:
- Cada objeto gráfico é definido (pela a sua geometria e outras propriedades não-geométricas, como a cor) no seu próprio espaço do objeto.
- O modelo é constituído juntando e organizando os vários objetos gráficos já definidos num grafo de cena.
Modelação de Objetos Gráficos
-
Geometria (forma). A geometria de um objeto gráfico (2D ou 3D) é geralmente obtida com:
- Objetos básicos como retas, quadrados, círculos, caminhos ou cubos, cilindros, reticulados, etc.
- Textos.
-
Transformações. As transformações são usadas para:
- Construir objetos gráficos compostos a partir de outros, mais simples.
- Posicionar cada objeto gráfico (definido no seu próprio espaço do objeto) no espaço do modelo.
- Modificar a geometria de objetos usando:
- Rotações.
- Escalas.
- Translações.
- e outras operações.
-
Aspeto (propriedades não geométricas). Além da construção da geometria (isto é, da forma) também são usadas propriedades que dizem respeito ao aspeto:
- Cores e transparências.
- Texturas.
- Estilos de linhas.
Geometria 2D
A geometria dos objetos gráficos usa linhas e outros conjuntos de pontos, como polígonos ou elipses.
O problema que se coloca aqui é saber como representar essas linhas, conjuntos de pontos, etc.
A representação dos objetos gráficos assenta na aplicação da matemática, em particular da Álgebra Linear e da Geometria Analítica, que proporcionam as definições formais (como ponto, plano, etc) e propriedades relevantes.
Neste capítulo vamos explorar a representação matemática das entidades geométricas:
- Sistemas de coordenadas (ou Referenciais).
- Equações para retas, circunferências e elipses.
- Equações paramétricas.
- Caminhos e formas «irregulares».
Referenciais
| Referenciais |
|---|
 |
| Referencial Cartesiano x Referencial Ecrã |
Um referencial é a ferramenta matemática que permite representar numericamente espaços geométricos.
Uma vez escolhido um referencial, cada ponto do espaço fica identificado por uma lista de números: as coordenadas desse ponto.
Num espaço 2D as coordenadas têm duas componentes, (x, y) e no espaços 3D têm três componentes (x, y, z).
Podemos escolher diferentes referenciais para tratar problemas diferentes. Dois dos referenciais 2D mais comuns são:
- O referencial cartesiano, normalmente usado na aulas de matemática.
- O referencial do ecrã, normalmente usado em dispositivos gráficos;
Geometrias Primitivas
| Algumas geometrias primitivas |
|---|
 |
| Um retângulo e um círculo |
Matematicamente, um objeto gráfico, como uma linha reta ou uma circunferência, é um conjunto de pontos.
Ingenuamente, poderíamos pensar em usar (digamos) listas com esses pontos. O problema é que mesmo os objetos gráficos mais simples são formados por infinitos pontos (quantos pontos existem numa linha?).
A solução para representar objetos gráficos consistem em usar equações.
Uma equação tem uma quantidade finita de informação que define um conjunto infinito de pontos.
Por exemplo $(x - 2)^2 + (y + 1)^2 = 9$ é um texto finito que define os infinitos pontos da circunferência de raio $3$ centrada em $(2, -1)$.
Consideremos as equações mais comuns:
- Equações da Reta $$Ax + By + C = 0$$ ou $$X = P + \lambda v$$
- Equação da Circunferência $$(x - x_0)^2 + (y - y_0)^2 = R^2$$
- Equação da Elipse $$\left(\frac{x - x_0}{a}\right)^2 + \left(\frac{y - y_0}{b}\right)^2 = 1$$
Mas:
- Quantos números são usados para representar uma reta? Quantos pontos estão nessa reta?
- Porque não se usa, para as retas, a equação mais comum $y = mx + b$?
- Ainda para a equação da reta, como é que se obtém a equação da reta que passa em dois pontos dados?
- Solução: Dados dois pontos $A = (x_A, y_A)$ e $B = (x_B, y_B)$ uma equação paramétrica da reta que passa em $A$ e $B$ é $$ X = A + \lambda (B - A) = (x_A, y_A) + \lambda (x_B - x_A, y_B - y_A) $$ Esta equação tem a seguinte propriedade conveniente: $X = A$ quando $\lambda = 0$ e $X = B$ quando $\lambda = 1$.
As equações dadas acima não são a forma mais adequada de trabalhar com objetos gráficos para efeitos da computação gráfica.
Desafio. Como obter $100$ pontos da circunferência $x^2 + y^2 = 3$?
Com equações paramétricas, que indicam explicitamente as coordenadas $(x, y)$ dos pontos do objeto.
-
Para a reta: $$ X = P + t v \Rightarrow (x,y) = (P_x, P_y) + t (v_x, v_y) \Rightarrow \left\lbrace \begin{aligned} x &= P_x + t v_x \cr y &= P_y + t v_y \end{aligned}\right. $$
-
Para a circunferência: $$ (x - x_0)^2 + (y - y_0)^2 = R^2 \Rightarrow \left\lbrace \begin{aligned} x &= x_0 + R \cos t \cr y &= y_0 + R \sin t \end{aligned} \right. $$
-
Para a elipse: $$ \left( \frac{x - x_0}{a} \right)^2 + \left( \frac{y - y_0}{b} \right)^2 = 1 \Rightarrow \left\lbrace \begin{aligned} x &= x_0 + a \cos t \cr y &= y_0 + b \sin t \end{aligned} \right. $$
Equações Paramétricas e Geometria
As equações paramétricas usam um parâmetro (nestes exemplos, a variável $t$) que imaginamos que está a percorrer um certo intervalo (digamos $\left\lbrack 0, 2\pi\right\rbrack$) num certo número de passos ($100$ por exemplo).
Conforme $t$ vai tomando diferentes valores nesse intervalo, vamos também obtendo diferentes valores das coordenadas $(x,y)$ dos pontos que formam a geometria do objeto gráfico.
| Uma circunferência desenhada parametricamente |
|---|
| Gerada pelo código abaixo |
function parametric_circle(cx, cy, r) {
return function(t) { return {
x: cx + r * Math.cos(t),
y: cy + r * Math.sin(t)
};
}
}
const ctx = document.getElementById("2d:geo:parametric").getContext("2d");
const my_circle = parametric_circle(128, 128, 64);
ctx.fillStyle = "steelblue";
const n = 64;
for (let t = 0; t <= n; t++) {
const angle = t * 2 * Math.PI / n;
p = my_circle(angle);
ctx.fillRect(p.x - 2, p.y - 2, 4, 4);
};
Desafio. A equação paramétrica da reta tem um problema: O que acontece quando $B = 0$?
Caminhos
As equações permitem representar eficientemente formas «regulares», mas nem sempre existe uma forma «regular» adequada ao objeto que se pretende construir…
Os caminhos permitem definir formas «irregulares» que podem ser tratadas como “objetos básicos”.
| Uma geometria difícil de representar com equações |
|---|
 |
| Gerada pelo código abaixo |
<svg>
<path
fill="none"
stroke="steelblue"
stroke-width="4"
stroke-linecap="round"
fill-rule="evenodd"
transform="translate(256,128)"
d="
M -200 0
Q 0 -200 200 0
Q 0 200 -200 0
M -100 50
L -100 -50
L 100 50
L 100 -50
L -100 50
Z
"/>
</svg>
Pensamos num caminho como (o resultado d)as operações que fazemos com um lápis numa folha de papel:
- traçar um contorno;
- pintar o interior dum contorno;
Traçar o contorno dum caminho
Um contorno é formado por por vários segmentos. Cada segmento é traçado a partir do fim do segmento anterior, como um lápis numa folha de papel.
| Tipos de segmentos curvos |
|---|
 |
| Uma curva quadrática x uma curva cúbica |
Há quatro tipos básicos de segmentos:
- salto. O lápis salta para uma certa posição.
- linha. O lápis desenha uma reta até uma certa posição.
- curva quadrática. O lápis desenha uma curva, controlada por um ponto, até uma certa posição.
- curva cúbica (ou bezier). O lápis desenha uma curva, controlada por dois pontos, até uma certa posição.
| Exemplo da construção do contorno dum caminho, segmento-a-segmento |
|---|
 |
Pintar o interior dum caminho
Pintar o interior dum caminho (isto é, encher a zona delimitada pelo caminho) é uma tarefa surpreendentemente difícil.
Definido um caminho fechado, como determinar se um dado ponto está dentro ou fora da região delimitada pelo caminho?
Para responder a esta questão é usado um de dois algoritmos (regras) para encher um caminho:
- A regra par-ímpar é mais simples e por isso menos controlável.
- A regra não-zero é mais complexa do que a regra par-ímpar mas permite tirar partido da orientação dos segmentos para definir o interior do caminho.
Ambas as regras funcionam com base no seguinte princípio:
- O retângulo é «varrido de cima para baixo» por linhas que «andam» da esquerda para a direita.
- Em cada uma dessas linhas são calculados os pontos que intersectam o caminho.
- É aplicada uma das regras para determinar quais segmentos limitados por esses pontos são interiores e quais são exteriores ao caminho.
| Par-ímpar | Não-zero |
|---|---|
| Os segmentos do caminho têm de ser orientados. | |
| Os pontos de interseção são numerados da esquerda para a direita (a começar em zero). | Os pontos de interseção são: |
| Positivos (azuis) se o segmento vem pela direita da linha. | |
| Negativos (vermelhos) se o segmento vem pela esquerda da linha. | |
| Os segmentos interiores estão entre um ponto par (azul) e um ponto ímpar (vermelho). | Os segmentos interiores estão entre pontos com total acumulado não zero (estritamente positivo ou negativo). |
 |  |
Explore o código SVG sobre caminhos
<path id="thePath"
d="
M 50 50
L 90 10
Q 10 10 10 50
L 50 50
C 10 90 90 90 70 50
Z" />

Aspeto 2D
A apresentação de um objeto gráfico, além da forma (definida pela geometria) também depende de outras propriedades visuais:
- cores, traços e tintas;
- textos e fontes;
Cores
A especificação numérica de uma cor depende de um espaço numérico.
Conforme a aplicação do modelo gráfico, certos espaços são mais adequados que outros:
- Para ecrãs, onde a cor é emitida, a escolha mais comum é um espaço RGB onde cada cor fica definida por três componentes
(r, g, b)correspondentes a vermelho, verde e azul. - Para impressão, onde a cor é refletida, usam-se espaços CMY (cião, magenta e amarelo) ou CMYK (cião, magenta, amarelo e preto). A adição do preto resulta da dificuldade de se produzir economicamente o preto com as restantes componentes.
- Para certas aplicações a escolha de uma cor em termos de RGB ou CMY (definidos em função do hardware) pode iludir a perceção humana; Um espaço de cor definido em termos de perceção humana é o HSL (de hue=tom, saturation=saturação e luminosity=luminosidade).
No contexto da web o espaço de cor normal é o RGB; Há imensas formas de especificar concretamente uma cor mas a mais comum é da forma #rrggbb em que rr, gg e bb são números entre 0 e 255 representados em notação hexadecimal. Por exemplo:
| cor | código hexadecimal | exemplo |
|---|---|---|
| cião | #00FFFF | |
| magenta | #FF00FF | |
| amarelo | #FFFF00 |
Além disso, através do CSS, também estão disponível cores por nome (ver as tabelas de cores na norma w3 ou na wikipedia).
Testar cores HSL
Testar cores RGB
Traços
Os traços (isto é, as propriedades visuais das linhas) são inesperadamente complexos.
Uma linha desenhada num dispositivo não é um objeto abstrato (como uma linha matemática, de espessura 0). Na prática as linhas têm formas específicas.
Os traços são definidos por:
- uma espessura.
- um tracejado
- as extremidades.
- as junções com outros traços.
- o corte das junções.
| Exemplos de traços | CSS |
|---|---|
| Espessuras | stroke-width |
 | 0.15, 1, 2, 4, 8 |
| Tracejados | stroke-dasharray |
 | 2 2, 1 2, 2 1 4 1, 1 2 2 1 |
| Extremidades | stroke-linecap |
 | butt, round, square |
| Junções | stroke-linejoin |
 | miter, round, bevel |
| Cortes | stroke-miterlimit |
 | 1, 4 |
Testar traços
Tintas
A tinta define como uma forma é pintada. Há várias formas de pintar uma geometria:
- usando uma cor sólida;
- usando um mosaico (uma imagem repetida);
- usando um gradiente de cores (uma variação suave entre cores);
Uma tinta pode ser aplicada apenas ao contorno (stroke) ou encher (fill) o interior da geometria:
| Traçar e Pintar um caminho |
|---|
 |
| Traçar x Pintar |
Mosaicos
O uso de mosaicos para traçar ou encher o contorno é semelhante à aplicação de uma cor sólida, com a particularidade de que a «cor» é um padrão repetido:
| Tinta do tipo “mosaico” |
|---|
 |
| Traçar x Pintar com mosaicos |
Gradientes de Cores
Os gradientes mais simples são lineares: uma cor inicial vai mudando suavemente ao longo de uma linha, até chegar a uma cor final. Também podemos definir versões um pouco mais complexas, com várias cores:
| Um gradiente linear |
|---|
 |
A forma de definir gradientes “multi-coloridos” consiste em associar cores a pontos de paragem. Um ponto de paragem fica definido por um certo offset (deslocamento) do caminho entre o ponto mais à esquerda e o ponto mais à direita:
- o ponto mais à esquerda tem
offset0; - o ponto mais à direita tem
offset1; - pontos intermédios têm
offsetentre 0 e 1. Por exemplo, um ponto exatamente a meio temoffset0.5 e um ponto a um quarto “do início do caminho” temoffset0.25;
Por exemplo, o gradiente acima está definido com:
-
Uma paragem com
offset0.00 e corkhaki: -
Uma paragem com
offset0.20 e corsteelblue: -
Uma paragem com
offset0.75 e corcrimson: -
Uma paragem com
offset1.00 e cordarkseagreen:
Outra propriedade que controla a aplicação dos gradientes é o prolongamento, que em geral tem três formas:
| Formas de prolongar gradientes |
|---|
 |
espelho (reflect) x repetir (repeat) x expandir (pad) |
Finalmente, um gradiente também pode ser circular (em vez de linear):
| Um gradiente circular |
|---|
 |
Texto
Texto e Fonte
O uso de textos envolve selecionar uma fonte e desenhar o texto de acordo com essa fonte.
- Um texto é um tipo especial de objeto geométrico, definido por uma sequência de carateres (letras, dígitos, etc);
- Uma fonte define os desenhos dos carateres;
Letras, Dígitos, Glifos
Tecnicamente, glifo é o termo que designa, em conjunto:
- As letras (a é β etc).
- Os dígitos (0 1 9 etc).
- Símbolos de pontuação (! , . etc).
- As ligaturas (Æ Œ fi etc).
- Outros símbolos (± ∫ → etc).
As propriedades das fontes estão definidas na norma CSS Fonts Module Level 3 e incluem, entre outras:
| atributo | variantes |
|---|---|
família (family) | serif, sans-serif, monospace |
estilo (style) | normal, italic |
espessura (weight) | normal, bold, bolder, lighter |
tamanho (size) | small, medium, large |
Transformações 2D
O processo da computação gráfica determina os seguintes passos:
- Modelação:
- Definição de cada objeto gráfico no respetivo espaço do objeto;
- Definição do modelo, no espaço do mundo, juntando os vários objetos gráficos do ponto anterior num único grafo de cena;
- Construção (Rendering): No espaço do dispositivo, com base no modelo do ponto anterior e das definições da vista;
A construção assenta num conjunto de operações (por exemplo, clipping) que, normalmente, são automaticamente tratadas pelo sistema gráfico em que se está a trabalhar.
Sobre a modelação falta esclarecer:
- Como cada objeto gráfico é definido no seu espaço;
- Como esse objeto é «transportado» para o espaço do mundo;
As Transformações são as principais ferramentas nestes passos. Neste capítulo vamos ilustrar o papel que desempenham.
Transformações: Representação Matricial e Casos Especiais
Uma transformação é uma função que aplica pontos em pontos:
$$ p = (p_x, p_y) \stackrel{T}{\longrightarrow} q = (q_x,q_y) $$
Os tipos principais de transformações são:
-
Translação: $q = (q_x,q_y)$ resulta de mover $p = (p_x, p_y)$ segundo uma certa direção;
-
Rotação: $q = (q_x,q_y)$ resulta de rodar $p = (p_x, p_y)$ um certo ângulo em torno da origem;p_0 =
-
Escala: $q = (q_x,q_y)$ resulta de aumentar ou reduzir $p = (p_x, p_y)$ por um certo fator;
-
Composição: $q = (q_x,q_y)$ resulta de aplicar a $p = (p_x, p_y)$ uma sequência de transformações;
Adicionalmente ainda podem ser usadas reflexões (em relação a um certo eixo ou ponto) e deslizamentos (numa certa direção).
A escolha destes quatro tipos de transformações principais assenta nas seguintes razões:
- são suficientemente expressivos para a maior parte das necessidades da computação gráfica;
- são intuitivamente acessíveis;
- são numericamente eficientes;
A eficiência numérica assenta na forma como os cálculos são efetuados: as coordenadas transformadas $(q_x, q_y)$ resultam de multiplicar as coordenadas originais $(p_x,p_y)$ por uma matriz de transformação:
$$ \begin{bmatrix} q_x \cr q_y \cr 1 \end{bmatrix} = \begin{bmatrix} a & b & c \cr d & e & f \cr 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} p_x \cr p_y \cr 1 \end{bmatrix} $$
Os valores concretos dos parâmetros a,b,c,d,e,f dependem da transformação concreta que se pretende aplicar às coordenadas originais.
Nas páginas seguintes vamos ver como esses valores também dependem do tipo de transformação.
Translações
| Exemplo de uma Translação |
|---|
 |
Uma translação consiste em mover as coordenadas originais $p = (p_x,p_y)$ segundo um certo vetor $d = (d_x, d_y)$ de forma que $$ q = p + d. $$
Isto é, as coordenadas transformadas são obtidas por $$ (q_x, q_y) = q = p + d = (p_x,p_y) + (d_x, d_y) $$
A matriz de translação é
$$ \begin{aligned} T(d_x,d_y) &= \begin{bmatrix} 1 & 0 & d_x \cr 0 & 1 & d_y \cr 0 & 0 & 1 \end{bmatrix} \end{aligned} $$
e temos
$$ \begin{aligned}(q_x, q_y, 1) &= T(d_x,d_y) \begin{bmatrix} p_x\cr p_y \cr 1 \end{bmatrix}\end{aligned} $$
Rotações
| Exemplo de uma Rotação |
|---|
 |
Uma rotação consiste em rodar as coordenadas originais $(p_x, p_y)$ segundo um certo ângulo $\alpha$ em torno da origem $(0, 0)$.
A matriz de rotação é
$$ \begin{aligned} R(\alpha) &= \begin{bmatrix} \cos\alpha & \sin\alpha & 0 \cr -\sin\alpha & \cos\alpha & 0 \cr 0 & 0 & 1 \end{bmatrix} \end{aligned} $$
e temos
$$ \begin{aligned}(q_x,q_y,1) &= R(\alpha) \begin{bmatrix} p_x\cr p_y \cr 1 \end{bmatrix}\end{aligned} $$
Escalas
| Exemplo de uma Escala |
|---|
 |
Uma escala consiste em encolher ou esticar as coordenadas originais $(p_x, p_y)$ segundo um certo fator $(s_x, s_y)$.
A matriz de escala é
$$ \begin{aligned} S(s_x,s_y) &= \begin{bmatrix} s_x & 0 & 0 \cr 0 & s_y & 0 \cr 0 & 0 & 1 \end{bmatrix} \end{aligned} $$
e temos
$$ \begin{aligned}(q_x,q_y,1) &= S(s_x,s_y) \begin{bmatrix} p_x\cr p_y \cr 1 \end{bmatrix}\end{aligned} $$
Composição
Nem sempre as transformações básicas são suficientes para construir os objetos gráficos pretendidos.
Nesse caso é necessário compor as transformações básicas de forma a obter-se o efeito pretendido.
Motivação da composição
| Exemplo de uma Composição |
|---|
 |
Supondo que se pretende escalar e rodar um certo objeto gráfico, sem o deslocar da posição em que está. O problema está na rotação, quo o feita em torno da origem do referencial, e não em torno do «centro do objeto».
A solução consiste em compor várias transformações de forma a obter-se o efeito pretendido. Geometricamente:
- Colocamos o referencial no «centro» do objeto, com uma translação.
- Com o referencial no «centro» do objeto, fazemos as operações de escala e de rotação.
- Repomos o referencial na posição em que estava inicialmente, de novo com uma translação.
Explore o código SVG sobre transformações

Gráficos 3D
 |
|---|
| A Strange World M. C. Escher |
Conceitos Fundamentais 3D
A Computação Gráfica 3D trata o problema da visualização a 2D de modelos 3D. Estes são compostos por objetos gráficos, fontes de luz e câmaras.
Um sistema gráfico 3D tem de resolver os muitos problemas derivados da representação dos objetos, das transformações, da organização e da construção da cena.
Funções de um Sistema Gráfico 3D
- Definir a geometria dos objetos gráficos.
- Aplicar transformações geométricas, aos objetos e às câmaras para os localizar e posicionar.
- Definir o aspeto (usando Texturas e Materiais) dos objetos.
- Iluminar a cena.
- Definir a vista (usando propriedades como projeção, localização, atitude, abertura, etc) do modelo.
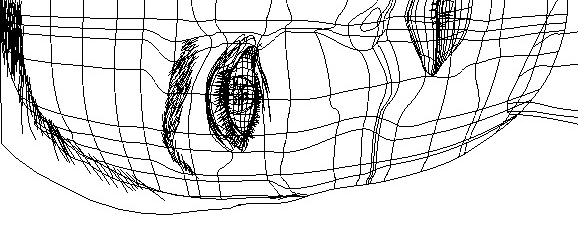
Geometria 3D
 |
|---|
| Geometria de um rosto |
Tipos de Geometrias
A geometria de um objeto 3D pode ser aproximada por várias técnicas.
Formas Básicas
Cubos, esferas, pirâmides, cones, etc.
As formas básicas são proporcionadas «diretamente» pelo sistema gráfico.
Geometrias Parametrizadas
Um cilindro é o rasto que uma circunferência deixa quando se desloca ao longo de um segmento de reta perpendicular ao plano da circunferência.
Certas formas podem ser definidas por um pequeno conjunto de parâmetros e objetos auxiliares e são proporcionadas por «funções» do sistema gráfico.
Conjuntos de Faces
Um rosto, o relevo de um terreno.
Formas mais irregulares têm de ser construídas definido individualmente as coordenadas dos vértices de uma rede de polígonos.
Além destas formas de construção de geometrias «estáticas» também são usadas técnicas que deformam a geometria inicial e que envolvem «esqueletos» e/ou «morphing». Estes técnicas não constam do programa deste curso.
Geometria construída
A geometria de um barco, construida a partir de proa, uma quilha e uma popa.
A popa e a proa são transformadas para se ajustarem à quilha. A quilha é uma extrusão, a proa é um conjunto de faces e a proa é uma transformação da popa.
Além das formas básicas, em geral estão disponíveis outras métodos para definir a geometria dos objetos gráficos.
Os métodos principais para construir geometrias são:
- As geometrias parametrizadas; em particular, extrusões.
- Os conjuntos de faces.
Exemplo/Aplicação da construção de geometrias.
Vamos ilustrar estes dois métodos construindo um objeto que usa ambos. O casco de um barco tem três partes:
- A proa (bow), usando um conjunto de faces.
- A quilha (keel), com uma extrusão.
- A popa (stern), transformando a proa.
Extrusões
| Peças de alumínio feitas por extrusão (fonte: Wikipedia) |
|---|
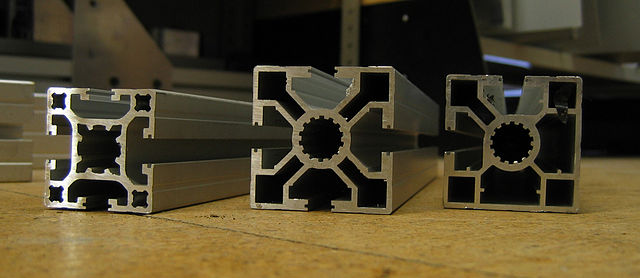 |
A secção transportada ao longo da espinha gera uma geometria 3D :
Exemplos de extrusões
- [2D] Um segmento é o rasto dum ponto quando se movimenta «a direito».
- [2D] Um quadrado é o rasto dum segmento quando se movimenta «a direito»
- [2D] Um círculo é o rasto dum segmento quando roda em torno dum ponto.
- [3D] Um cubo é o rasto dum quadrado ao longo dum segmento.
- [3D] Um cilindro é o rasto duma circunferência ao longo dum segmento.
Parâmetros das extrusões
Uma extrusão é definida por:
- A
secção- Uma superfície 2D assente no plano
Y=0. - Por exemplo, uma circunferência, um disco, um «L».
- Uma superfície 2D assente no plano
- A
espinha- Uma sequência de pontos no espaço 3D.
- Parâmetros adicionais
- Parâmetros específicos de cada sistema gráfico, que controlam pormenores do rendering desta geometria.
- Por exemplo, no sistema
X3Das extrusões podem terrotaçõeseescalasdefinidas ao longo daespinha.
Estes parâmetros definem uma geometria de acordo com o seguinte processo:
- A
secção, que é definida no planoY=0é «transportada» para o primeiro ponto daespinhae orientada para o ponto seguinte. - Da mesma forma, a
secçãoé colocada no segundo ponto daespinha. - Os vértices correspondentes da primeira e da segunda
secçõessão ligados, formando um quadrilátero entre cada par de vértices. - Este processo é depois repetido para o resto dos pontos da
espinha, resultando numa superfície de extrusão («arrasto») ao longo daespinha.
Conjuntos de Faces
| Aproximações de uma geometria por conjuntos de faces |
|---|
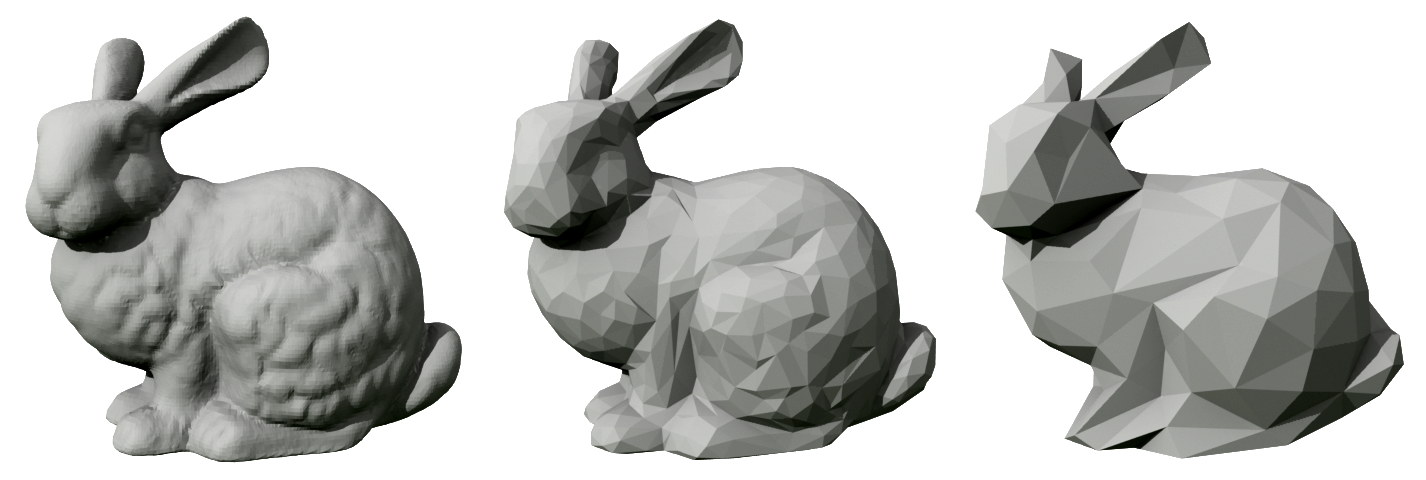 |
| fonte: Artigo «Computer Graphics (computer science)» na Wikipédia |
Formas pouco regulares (por exemplo, um rosto ou um terreno) têm de ser construídas definido individualmente as coordenadas dos vértices e ligando esses vértices para formar faces (triângulos ou quadriláteros).
Parâmetros dos conjuntos de faces
Um conjunto de faces é definido por:
- Os
vértices- Um ponto no espaço 3D, dado pelas suas coordenadas
x, y, z. - Em geral os vértices são «arrumados» numa lista e referenciados pelo seu índice nessa lista.
- Um ponto no espaço 3D, dado pelas suas coordenadas
- As
faces- Uma lista de três (ou, no caso do
X3D, mais) vértices. - Normalmente é usado o índice na lista dos
vértices, em vez das coordenadas.
- Uma lista de três (ou, no caso do
Regra da mão direita
Um aspeto importante na definição de uma face é a ordem em que os (índices dos) vértices são dados.
Dados três pontos no espaço 3D,
A, B, C, a face «para cima» é definida pela regra da mão direita. Se os pontos forem dados pela ordemA, C, Bentão a face «para cima» é oposta.
Quando esta regra é esquecida o resultado típico são «faces invisíveis».
Aspeto 3D
| Efeito da iluminação na perceção de um objeto |
|---|
 |
A luz é refletida segundo um certo ângulo tangente à superfície do objeto no ponto onde incide:
- O ângulo é determinado pelas normais (que dependem da geometria do objeto).
- As cores somam a cor própria do objeto à cor da luz incidente.
- Os reflexos definem quanta luz incidente é refletida pelo objeto.
O aspeto percecionado de um objeto depende:
- Da iluminação da cena.
- Da textura desse objeto.
Parâmetros das texturas
As texturas (ou materiais) são propriedades do objeto que contribuem para a sua perceção e definem como o objeto é «pintado» e como transforma a luz.
- Cores (difusão: diffuse)
- São as cores próprias do objeto:
luz refletida = cor do objeto + luz incidente. - Por exemplo, um cubo laranja difunde a cor laranja e um cubo verde difunde verde.
- São as cores próprias do objeto:
- Reflexos (specular)
- Determinam a quantidade de luz refletida:
luz refletida = reflexo _ luz incidente. - Por exemplo, um cubo brilhante reflete quase toda a luz que recebe, enquanto que um cubo baço quase não reflete a luz que recebe.
- Determinam a quantidade de luz refletida:
- Normais (normals)
- Dependem da geometria do objeto e determinam a direção da luz refletida:
ângulo da luz refletida = normal + ângulo da luz incidente. - Por exemplo, num cubo liso as normais são perpendiculares às faces mas num cubo rugoso as normais têm desvios da perpendicular.
- Dependem da geometria do objeto e determinam a direção da luz refletida:
Tipos de iluminação
A iluminação resulta de um conjunto de propriedades do modelo (da cena) que contribuem para a perceção dos vários objetos nesse modelo.
As fontes de Luz definem propriedades como «cor emitida», «atenuação», etc e, em geral, incluem os seguintes tipos:
- Luz Ambiente
- Incide igualmente em todos os objetos gráficos, independentemente da posição ou pose.
- Ponto de Luz
- Emite luz em todas as direções, a partir de uma certa posição.
- Por exemplo, uma lâmpada numa sala.
- Foco
- Emite um cone de luz (com uma certa orientação) a partir de uma certa posição.
- Por exemplo, um projetor numa secretária.
- Direcional
- Emite luz em «raios paralelos» a uma certa orientação.
- Por exemplo, o sol a iluminar uma cena na superfície da terra.
Mapas de texturas
Não é viável definir-se ponto-a-ponto os parâmetros de textura numa geometria. Em vez disso, usam-se imagens especiais, os mapas de textura, para aplicar cores, reflexos e normais a uma geometria.
Vejamos o efeito que cada caraterística das texturas tem na perceção (e realismo) do objeto seguindo um exemplo: o planeta terra.
Modelo da terra: geometria
A geometria da terra é (aproximadamente) uma esfera, e vamos supor que na cena há um ponto de luz razoavelmente afastado, de forma a simular o sol.
Modelo da terra: difusão
A difusão define as cores «próprias» do objeto: luz refletida = cor do objeto + luz incidente.
| Difusão da terra |
|---|
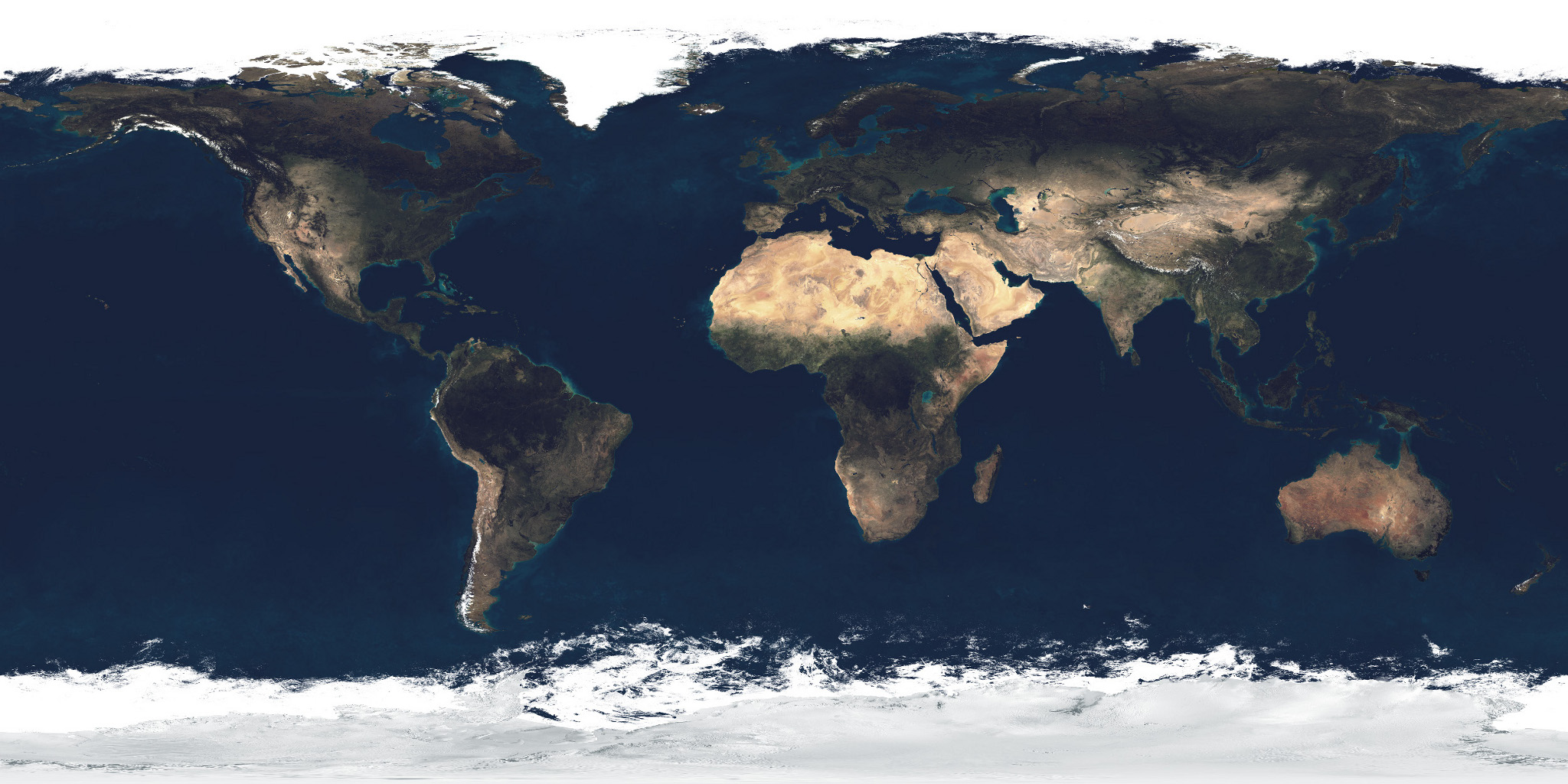 |
| Uma imagem com as cores da superfície da terra |
Para pintar «num passo» todas as cores da superfície da esfera usa-se uma textura para a difusão das cores.
Modelo da terra: reflexos
Os reflexos determinam a quantidade de luz refletida: luz refletida = reflexo * luz incidente.
| Reflexos da terra |
|---|
 |
| Uma imagem com os reflexos da superfície da terra |
Para pintar «num passo» todos os reflexos na superfície da esfera usa-se uma textura para a reflexão das cores.
Nestas texturas branco significa «reflete 100%», preto significa «reflete 0%» e tons intermédios refletem percentagens intermédias.
A principal diferença em relação aos mapas de difusão «simples» está nas zonas que devem brilhar. Por exemplo, nas zonas com água (rios, lagos, mares, oceanos) pode ver-se o reflexo do «sol» enquanto que nas zonas «de terra» não há grandes diferenças.
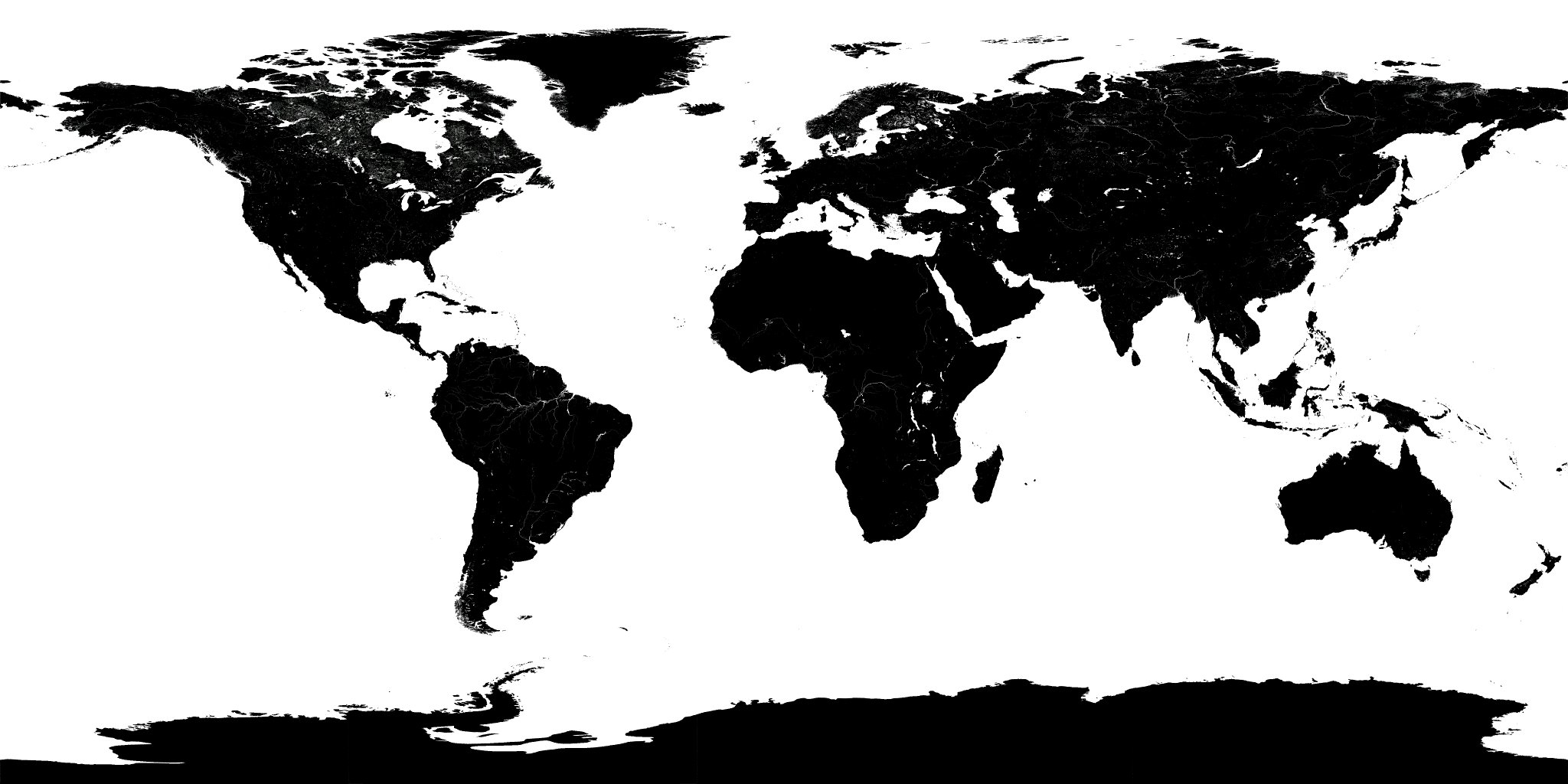
Modelo da terra: normais
As normais determinam a direção da luz refletida: ângulo da luz refletida = normal + ângulo da luz incidente.
| Normais da terra |
|---|
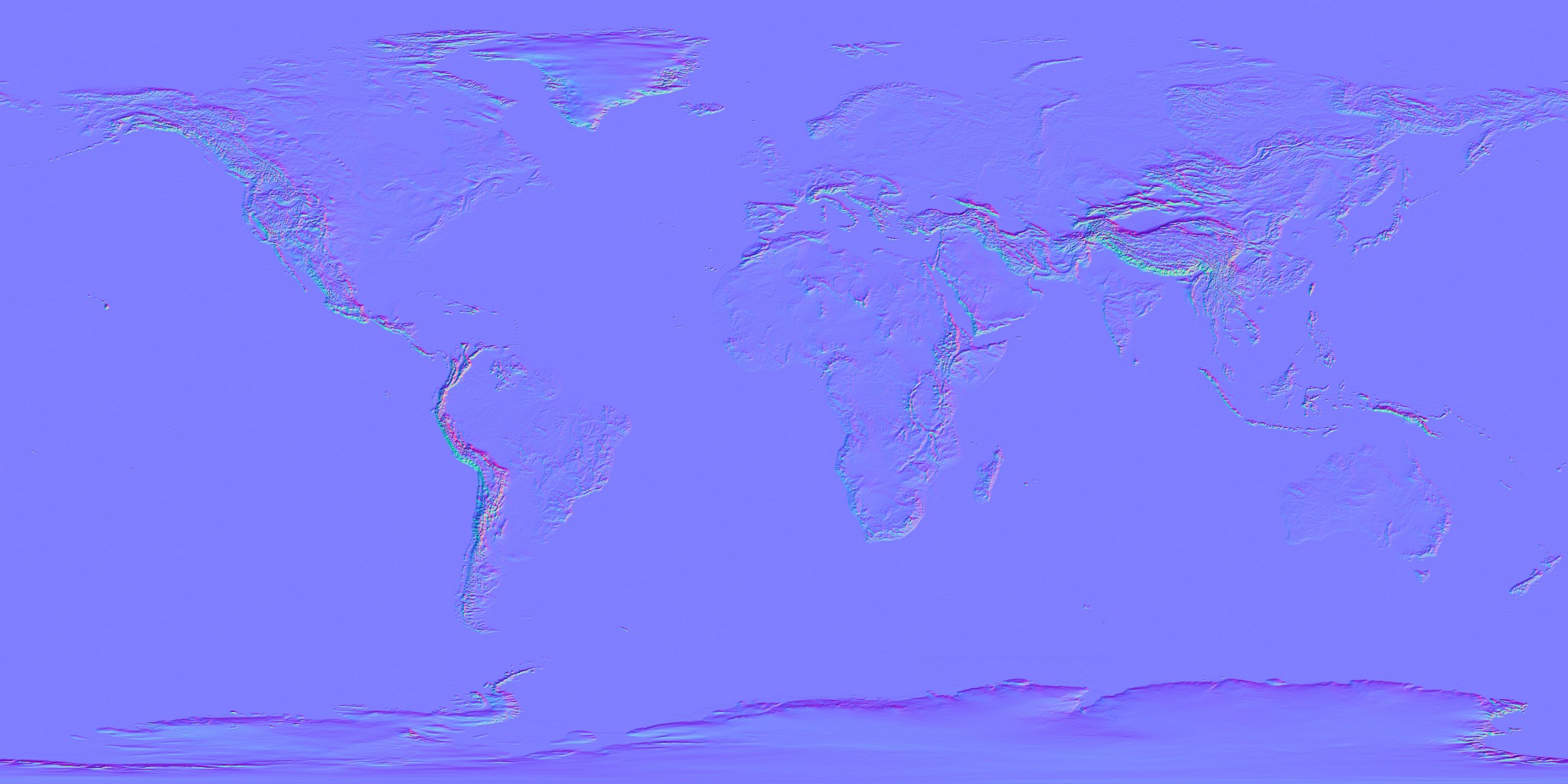 |
| Uma imagem com as normais da superfície da terra |
Para pintar «num passo» as normais à superfície da esfera usa-se uma textura para as normais.
Representação das normais por uma imagem
Uma normal é um vetor no espaço 3D e, como tal, tem três componentes,
xyz.Uma cor também tem três componentes,
RGB, e nestes mapas uma corRGBrepresenta um vetorxyzassociando:R→x,G→y,B→z.
Mapas UV
A aplicação de uma textura à geometria tem de ser controlada, de forma a aplicar as partes corretas da textura às faces da geometria. Esse controlo é definido por um mapa UV.
Aplicação «descontrolada»
Textura aplicada por faces
Aplicação das texturas por faces
| Uma textura para um dado |
|---|
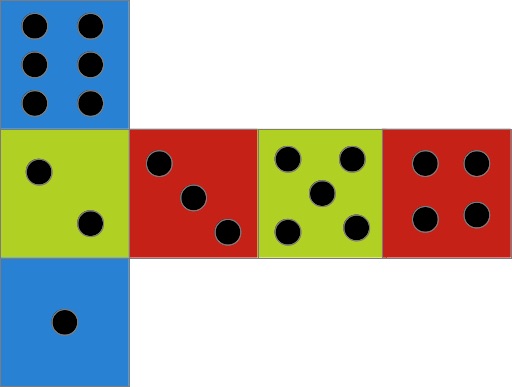 |
As texturas definidas por imagens são uma forma conveniente de refinar o aspeto de um objeto gráfico.
Para funcionar corretamente, é preciso controlar como cada setor da textura é associado a cada face da geometria do objeto.
As coordenadas uv são usadas para posicionar os pontos da textura:
- Usa-se «
uv» em vez de «xy» para evitar confusões com as coordenadasxyzda geometria. - O referencial
uvé adaptado de forma a que toda a imagem da textura fique no quadrado $(0,0) - (1,1)$.
| Pontos e setores de uma textura |
|---|
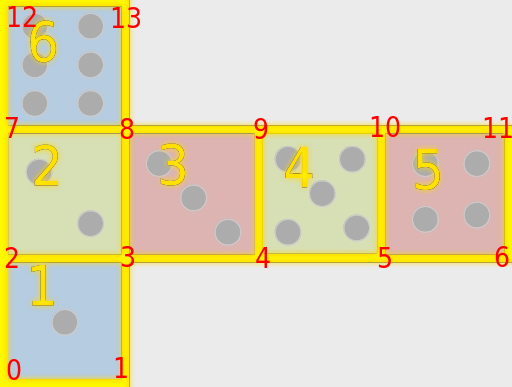 |
Cada setor (amarelo) é definido por pontos uv (vermelhos) |
O setor 4 é definido pelos pontos uv 4, 5, 10, e 9 |
O ponto 0 tem coordenadas uv $(0,0)$; O ponto 9 tem coordenadas uv $(0.5, 0.66)$ |
Especificamente:
- Os vértices estão na geometria 3D
- Têm coordenadas
xyz.
- Têm coordenadas
- As faces estão na geometria 3D
- Definem-se com listas de índices de vértices.
- Os pontos estão na textura 2D
- Têm coordenadas
uv.
- Têm coordenadas
- Os setores são «pedaços» da textura 2D
- Definem-se com listas de índices dos pontos.
A aplicação de mapas UV é adequado a geometrias definidas por conjunto de faces onde os vértices e as faces estão explicitamente indicados.
Processo para definir um mapa UV
O processo para ilustrar a aplicação dos mapas UV é o seguinte:
- Definir os vértices e a lista de faces da geometria 3D.
- Definir os pontos e a lista de setores da textura 2D.
- O primeiro setor é aplicado à primeira face, etc.
Regra da mão direita. Na definição dos setores,
7 8 3 2não é o mesmo que7 8 2 3.Tem de usar a regra da mão direita para se determinar o lado da face como uma página numa folha de papel.
Transformações 3D
| Investigação da perspetiva (gravura de Albrecht Dürer, 1525) |
|---|
 |
| Representação 2D de um objecto 3D |
São usados dois tipos de transformações num sistema gráfico 3D:
- Transformações afins. Alteram o tamanho, posição e orientação de objectos no espaço 3D.
- São geralmente usadas no espaço do mundo ou do objeto e generalizam as transformações dos sistemas gráficos 2D. São usadas para posicionar, rodar e escalar os objetos gráficos.
- Projeções. Produzem a vista 2D do modelo 3D.
- Estão associadas a câmaras e são usadas para definir a vista da cena, isto é, a transformação espaço 3D do modelo → espaço 2D do dispositivo.
Parâmetros de vistas e de câmaras
Uma vista de uma cena é obtida fazendo uma certa projeção do modelo, precisamente da mesma forma que uma câmara fotográfica produz uma imagem 2D de um ambiente 3D.
A projeção que define a vista é normalmente designada câmara e depende de um conjunto de parâmetros. Os mais comuns são:
-
Tipo
- Tipo da projeção (
ortográfica,projetiva, etc depende do sistema gráfico).
- Tipo da projeção (
-
Abertura (FOV)
- Ângulo de captura (depende do tipo de câmara).
-
Proporção (Ratio, Aspect)
- Relação entre a altura e a largura (depende do tipo de câmara).
-
Perto (Near)
- Distância do plano de corte «perto».
-
Longe (Far)
- Distância do plano de corte «longe».
Animação
| Estroboscópio |
|---|
 |
| A ilusão de movimento resulta da rapidez com que as imagens são apresentadas |
Com animação uma cena estática ganha vida e torna-se mais informativa e interessante.
A animação resulta de mostrar imagens, os fotogramas (em inglês frames) em rápida sucessão: Animação = Imagem x Tempo.
Animação por Fotogramas
| Figuras em vaso funerário (3º Milénio AEC) |
|---|
 |
| Imagens sequenciais dum salto de um bode |
O número de fotogramas e de FPS são fixos.
Por exemplo: 480 fotogramas a 24 FPS proporcionam uma animação (um filme) com 20 segundos de duração.
O limiar perceção humana anda perto dos 24FPS.
- Se os fotogramas forem substituídos a um ritmo de 24 por segundo, a maioria das pessoas não distingue a passagem de um fotograma para o seguinte e interpreta «o que está a ver» como um movimento fluído.
- Na realidade, 24 fotogramas por segundo está demasiado perto do limiar de perceção e a esta frequência muitas pessoas apercebem-se da substituição dos fotogramas.
- Os primeiros filmes foram filmados e projetados entre 16FPS e 24FPS.
- A frequência «padrão» 24FPS foi adotado no início da computação gráfica.
- Atualmente as placas gráficas proporcionam facilmente 60+FPS.
Uma animação por fotogramas é feita para uma certo número de FPS e não resulta bem com FPS diferentes.
- O número de FPS pode variar em função do dispositivo, da “carga”, etc.
A animação por tempo resolve o problema das diferenças de frequências na animação por fotogramas.
Animação e Programação
Daqui em diante a matéria de Computação Gráfica muda substancialmente.
O foco deixa os sistemas gráficos específicos e passa para a representação e para o processamento de modelos gráficos.
Certifique-se que está confortável a programar.
Animação por tempo
A animação por tempo resulta de definir chaves (keys): Os valores de certos parâmetros em determinados instantes.
Por exemplo: A posição x = 1 no instante t = 0 e x = 2 no instante t = 2.
É necessário calcular automaticamente os valores intermédios dos parâmetros que controlam uma animação.
Por exemplo:
- A posição de objeto é definida pelo parâmetro
x. - É data a posição inicial:
x = 1quandot = 0.5. - E a posição final:
x = 2quandot = 2.5. - Sempre que necessário, pretende-se calcular as posições intermédias desse objeto.
Interpolação linear de valores intermédios entre duas chaves
As chaves definem os pontos «vermelhos»; o início e o fim:
const keys = [
{
t: 0.0,
parameters: { x: 1.00 }
},
{
t: 2.0,
parameters: { x: 2.00 }
}
];
| Valores Interpolados |
|---|
 |
| Os pontos «verdes» são calculados pela interpolação linear entre os pontos «vermelhos». |
Processo da Animação por Tempo
- São definidas chaves (keys) específicas.
- Cada chave define um instante e valores de parâmetros.
- Durante a animação:
- Os valores dos parâmetros são recalculados sempre que necessário.
- O modelo gráfico é atualizado com os novos valores dos parâmetros e construído/desenhado de novo.
A animação por tempo resolve o problema das diferenças de frequências que a animação por fotogramas coloca.
Sempre que o sistema gráfico está pronto para mostrar um novo fotograma, os valores dos parâmetros são recalculados; o modelo gráfico é atualizado com os novos valores dos parâmetros e desenhado de novo.
Isto significa que a definição de uma animação é feita através de modelo e esse modelo tem parâmetros que definem cada «fotograma» na sequência.
Modelos e Parâmetros
- Modelo — Conjunto de variáveis (parâmetros) que definem cada «fotograma» na sequência.
- Parâmetro — Variável que define um elemento da animação.
Exemplos de Modelos e Parâmetros
-
Um quadrado vermelho desloca-se da esquerda para a direita. Neste caso o modelo necessita apenas de um parâmetro, a abcissa ($x$) do quadrado:
const model = { x: 0 }; -
Um quadrado vermelho desloca-se na horizontal e na vertical. O modelo necessita de dois parâmetros, a abcissa ($x$) e a ordenada ($y$) do quadrado:
const model = { x: 0, y: 0 }; -
Um quadrado desloca-se na horizontal, na vertical e pode mudar de cor:
const model = { x: 0, y: 0, color: 'crimson' }; -
Vários quadrados deslocam-se na horizontal, na vertical e podem mudar a cor:
const model = { my_squares: [ { x: 0, y: 0, color: 'crimson' }, { x: 0, y: 8, color: 'khaki' } ] };
Tweens
Os tweens (contração do inglês «in-between») assentam uma técnica simples mas flexível e eficiente para:
- calcular os valores intermédios entre
- um valor inicial $x_I$ e
- um valor final $x_F$ durante
- um certo intervalo de tempo $[t_I, t_F]$.
O valor intermédio, $x_t$, quando $t_I \leq t \leq t_F$, é calculado usando a fórmula: $$ x_t = \frac{(t_F - t)x_I + (t - t_I)x_F}{t_F - t_I} $$
Um tween atualiza, ao longo de um certo intervalo de tempo $[t_I, t_F]$, um valor $x_t$ que varia de $x_I$ quanto $t = t_I$ para $x_F$ quando $t = t_F$.
Os parâmetros fundamentais de um tween são:
- Valor Inicial ($x_I$)
- Em que valor começa a variação do parâmetro.
- Valor Final ($x_F$)
- Em que valor termina a variação do parâmetro.
- Tempo Inicial ($t_I$)
- Em que instante começa a variação do parâmetro.
- Tempo Final ($t_F$) ou Duração ($d$)
- Em que instante termina a variação (tempo final) ou quanto tempo demora a variação (duração). A relação entre o tempo inicial, o tempo final e a duração é: $$ d = t_F - t_I $$
Os tweens são usados para fazer animações com modelos parametrizados.
Tipos de Tweens
Os tweens descritos acima são lineares: a variação do parâmetro é proporcional ao tempo decorrido.
function draw(c, m) {
c.fillStyle = "steelblue";
c.fillRect(0, 0, 480, 120);
c.fillStyle = "crimson";
c.fillRect(m.linear.x, 10, 40, 40);
c.fillStyle = "khaki";
c.fillRect(m.nonlinear.x, 70, 40, 40);
}
const context = document
.getElementById("anim:tween:1")
.getContext("2d");
const model = {
linear: {x: 10,},
nonlinear: {x: 10}
};
const linear = new TWEEN.Tween(model.linear)
.to({x: 430}, 2000)
.easing(TWEEN.Easing.Linear.None)
.yoyo(true)
.repeat(Infinity)
.start();
const cubic = new TWEEN.Tween(model.nonlinear)
.to({x: 430}, 2000)
.easing(TWEEN.Easing.Quadratic.InOut)
.yoyo(true)
.repeat(Infinity)
.start();
const step = function(ctx, mdl) {
TWEEN.update();
draw(ctx, mdl);
requestAnimationFrame(function () {
step(ctx, mdl)
});
}
step(context, model);
Para animações com «objetos naturais» este tipo de tween não funciona bem porque produz movimentos uniformes, com velocidade constante.
- O resultado é semelhante ao movimento dos robots nos filmes antigos, ou de segunda categoria e também de alguns estilos de dança.
Os movimentos naturais não são lineares. Alguns aceleram no início e travam no fim. Outros têm uma fase de «ganhar balanço». As variantes são muitas.
- Easing define a aceleração de um tween e, em geral, tem as algumas variantes bem definidas.
- Ease-In tipo de aceleração no início da variação.
- Ease-Out tipo de aceleração no fim da variação.
Suporte para Tweens
A biblioteca tween.js proporciona um sistema flexível e eficiente para definir e usar tweens. Os tweens desta biblioteca:
- São construídos com um valor inicial, um valor final e uma duração.
- Aceitam uma grande variedade de easings.
- Podem ser operados de várias formas:
- yoyo: depois de atingir o valor final, o tween volta ao inicial.
- repetir: o tween é repetido um certo número de vezes.
- encadear: aplicar um segundo tween após a conclusão do primeiro.
- etc.
O Ciclo de Animação
Qualquer animação é um ciclo infinito de atualização (update) e construção (render) de um modelo.
Os ciclos de animação e o uso dos tweens têm essencialmente a mesma estrutura e podem ser facilmente unificados.
Ciclo de Animação
const m = initial_model();
while (true) {
m.update();
m.render();
}
Ciclo dos Tweens
const t = TWEEN.Tween(...) ... ;
t.start();
while (true) {
t.update();
const x = t.value();
...
}
Programação Web e Ciclos Infinitos
Ciclos infinitos e
requestAnimationFrame
No contexto da programação na Web, os ciclos infinitos devem ser implementados com a função requestAnimationFrame.
function draw(context, model) {
/// Desenha o modelo atualizado no contexto fornecido.
}
function update(model) {
// Por exemplo, usando TWEEN.update();
}
const model = {
// valores iniciais dos parâmetros;
};
const step = function(ctx, mdl) {
update(mdl); // Atualiza os parâmetros do modelo.
draw(ctx, mdl); // Desenha o modelo atualizado.
requestAnimationFrame(function () { // Repete o ciclo de animação.
step(ctx, mdl)
});
}
step(context, model); // Inicia o ciclo de animação.
A razão para fazer o ciclo de animação com a função requestAnimationFrame é que, desta forma, o navegador pode pausar a execução do código JavaScript quando necessário.
Na versão seguinte versão alternativa, o ciclo de animação é implementado usando um ciclo while infinito que bloqueia o navegador e portanto, deve ser evitado.
function draw(context, model) {
/// Desenha o modelo atualizado no contexto fornecido.
}
function update(model) {
// Por exemplo, usando TWEEN.update();
}
const model = {
// valores iniciais dos parâmetros;
};
// BAD BAD NOT GOOD
while (true) { // ** O NAVEGADOR FICA BLOQUEADO AQUI **
update(model); // Atualiza os parâmetros do modelo.
draw(context, model); // Desenha o modelo atualizado.
}
Animação por passos
Embora flexíveis, nos tweens todos os valores estão determinados antes da animação começar. Uma vez iniciado, o tween vai seguir um «percurso» fixo, previsível.
Quando a animação dum objeto depende doutros objetos ou eventos, é necessário ir além dos tweens.
Por exemplo:
- Com movimentos baseados na física é preciso tratar da aceleração, colisões com outros objetos, etc.
- Os comportamentos reativos («seguir …», «olhar para …», etc) dependem dos valores de outros objetos.
- Os objetos controlados por interação (do teclado, rato, etc) dependem de valores externos ao próprio modelo.
m = initial_model(); // Inicialização do modelo
while (true) { // Ciclo de animação
m.update() // Atualizar o modelo
render(m) // Construir a imagem
}
A estrutura básica da animação por tempo, com modelos parametrizados e o ciclo seguinte é válida em geral: a animação resulta da variação dos parâmetros calculada na atualização, quer esta variação resulte de tweens ou de outros cálculos.
Atualização Dinâmica
| Intervalo entre fotogramas consecutivos |
|---|
 |
| A atualização dos parâmetros adaptar-se ao intervalo entre fotogramas consecutivos. |
Quando o tempo decorrido entre dois fotogramas não é constante, a atualização dos parâmetros do modelo tem de adaptar-se a essa variação.
Os tweens fazem automaticamente esta adaptação: O «valor» do tween é atualizado «internamente».
Para animações gerais, é necessário proporcionar, ao ciclo de animação, informação sobre o tempo: A forma universal e prática para lidar com a variação do tempo no ciclo da animação consiste em passar informação temporal para guiar a atualização dos parâmetros do modelo.
Revisitar o Ciclo de Animação
A função requestAnimationFrame é o elemento fundamental das animações na web (veja a documentação completa em MDN).
window.requestAnimationFrame(callback)
- A função indicada como argumento (
callback) é «chamada» cada vez que o sistema (por exemplo, o browser) está pronto para iniciar um novo passo da animação. - Quando a função
callbacké «chamada» recebe um único argumento,timestampque assinala esse preciso momento.
function render(element, model) {
const count = model.count;
const time = Math.round(model.time * 0.001);
const elapsed = Math.round(model.elapsed);
const fps = Math.round(1000 * model.count / model.time);
element.innerHTML = `<table>` +
`<tr><td>Count</td><td>Time</td><td>Elapsed (dt)</td><td>FPS</td></tr>` +
`<tr>` +
`<td> ${count} </td>` +
`<td> ${time}s </td>` +
`<td> ${elapsed}ms </td>` +
`<td> ${fps} </td>` +
`</tr>` +
`</table>`;
}
let element = document.getElementById("anim:steps:counter");
let model = {
count: 0, time: 0, elapsed: 0
};
let start_time = performance.now();
let last_time = performance.now();
animation_step = function (timestamp) {
let progress = timestamp - start_time;
let elapsed = timestamp - last_time;
last_time = timestamp;
model.count += 1;
model.time = progress;
model.elapsed = elapsed;
render(element, model);
requestAnimationFrame(animation_step);
}
requestAnimationFrame(animation_step);
Exemplo: Movimentos Baseados na Física
Para ilustrar uma aplicação da animação por passos usamos uma (simples) simulação física do movimento uniformemente acelerado.
Esta animação não é possível usando apenas tweens porque as colições e as interações modificam o modelo de formas que não podem ser antecipadas.
- Uma «bola» vermelha saltita numa «caixa» azul.
- A «bola» está sujeita à força da gravidade (constante $G$).
- Um clique na «caixa» dá um impulso (com força $K$) à «bola».
- As colisões amortecem a velocidade da «bola» (com fator $D$).
As leis do movimento (de Newton) definem o estado de uma partícula em termos de posição $p$, velocidade $v$ e aceleração $a$ e como variam a posição e a velocidade em função da posição, velocidade, aceleração e do tempo decorrido $\delta_t$:
$$ \left\lbrace \begin{aligned} v & \gets v + a \delta_t, \cr p & \gets p + v \delta_t \end{aligned} \right. $$ porque $$ \left\lbrace \begin{aligned} a &= \delta_v / \delta_t, \cr v &= \delta_p / \delta_t \end{aligned} \right. $$
const model = {
x: 64, y: 64, // ball position
vx: 0, vy: 0, // ball velocity
ax: 0, ay: 0, // ball acceleration
r: 16, // ball radius
min_x: 0, max_x: 256, // box bounds: x
min_y: 0, max_y: 256, // box bounds: y
G: 0.25e-3, D: 0.8, // physics constants
K: 0.8, // kick strength
kick: true, // kick flag
};
// Record time of the animation start
const start = performance.now();
// Record time of the previous step
let prev_ts = performance.now();
// Record time of the step start
const start_ts = performance.now();
// Animation step function
const step = function (ts) {
const dt = ts - prev_ts;
prev_ts = ts;
// update acceleration
if (model.kick) { // KICK
model.ax = model.K * linmap(model.x, model.min_x, model.max_x, -1, 1);
model.ay = model.K * linmap(model.y, model.min_y, model.max_y, -1, 1);
model.kick = false;
} else { // NO KICK
model.ax = 0.0;
model.ay = model.G; // gravity
}
// update velocity
model.vx = model.vx + model.ax * dt;
model.vy = model.vy + model.ay * dt;
// update position
model.x = model.x + model.vx * dt;
model.y = model.y + model.vy * dt;
// check collisions
if (model.x - model.r < model.min_x) {
model.vx = -model.D * model.vx;
model.x = model.min_x + model.r;
}
if (model.x + model.r > model.max_x) {
model.vx = -model.D * model.vx;
model.x = model.max_x - model.r;
}
if (model.y - model.r < model.min_y) {
model.vy = -model.D * model.vy;
model.y = model.min_y + model.r;
}
if (model.y + model.r > model.max_y) {
model.vy = -model.D * model.vy;
model.y = model.max_y - model.r;
}
// Render the model in the graphics system
render(context, model);
requestAnimationFrame(step);
}
requestAnimationFrame(step);
Exercícios
 |
|---|
| Desenho original por Enki Bilal |
Exercícios Javascript
Funções geradoras
Funções que geram coleções de valores.
Uma coleção é uma estrutura de dados que armazena ou produz valores, como arrays ou listas.
Por exemplo:
const numbers = [1, 2, 3, 4];
- Escreva uma função
repete(x, n)que devolve umarraycomncópias dex. - Escreva uma função
aleatorios(n)que devolve umarraycomnnúmeros aleatórios. - Escreva uma função
intervalo(a, b)que devolve umarraycom os números inteiros entreaebincluindo ambos os extremos. Seb < ao resultado deve ser a lista vazia[]. - Escreva uma função
linspace(a, b, n)que enche umarraycomnnúmeros reais (float) entreaeb, igualmente espaçados.- Por exemplo
linspace(0, 1, 3)devolve[0.0, 0.5, 1.0].
- Por exemplo
Filtros
Funções que selecionam elementos de uma coleção.
Em geral, a seleção pode ser feita por meio de condições booleanas.
Por exemplo:
const even_numbers = numbers.filter(x => x % 2 === 0);
// [2, 4]
- Escreva uma função
pares(x)que tem como argumento umarray xde números inteiros e que devolve umarrayapenas com os números pares.- Por exemplo
pares([1, 2, 4, 5, 2, 3])devolve[2, 4, 2].
- Por exemplo
- Escreva uma função
positivos(x)que tem como argumento umarray xde números reais e que devolve umarrayapenas com os números positivos.- Por exemplo
positivos([1, -2.5, 0.4, 0.0, -1.5, 2, 2.3])devolve[1, 0.4, 2, 2.3].
- Por exemplo
- Escreva uma função
limite_sup(x, a)que tem como argumentos umarray xde números reais e um valorae que devolve umarrayapenas com os números menores ou iguais que o valora.- Por exemplo
limite_sup([1, -2.5, 0.4, 0.0, -1.5, 2, 2.3], 0.4)devolve[-2.5, 0.4, 0.0, -1.5].
- Por exemplo
- Escreva uma função
filtro(f, x)que tem como argumentos uma funçãof: float -> booleane umarray xde números reais e que devolve umarrayapenas com os númerosxidextais quef(xi) === true.- Por exemplo
filtro(x => x % 2 === 0, [1, 2, 4, 5, 2, 3])devolve[2, 4, 2]. Quais das alíneas acima consegue tornar a resolver usando esta função?
- Por exemplo
Mapas
Funções que transformam elementos de uma coleção.
Em geral, a transformação pode ser feita por uma função que aplica um valor num outro valor.
Por exemplo:
const square_numbers = numbers.map(x => x ** 2);
// [1, 4, 8, 16]
- Escreva uma função
dobro(x)que tem como argumento umarray xde números reais e que devolve umarraycom os dobros desses números.- Por exemplo
dobro([1, 2.1, 4, 5, -2, 3])devolve[2, 4.2, 8, 10, -4, 6].
- Por exemplo
- Escreva uma função
quadrado(x)que tem como argumento umarray xde números reais e que devolve umarraycom os quadrados desses números.- Por exemplo
quadrado([1, -2.5, 0.4])devolve[1, 6.25, 0.16].
- Por exemplo
- Escreva uma função
unicos(x)que tem como argumento umarray xde números reais e que devolve umarraysem valores repetidos.- Por exemplo
unicos([1, -2.5, 1])devolve[1, -2.5].
- Por exemplo
- Escreva uma função
crescente(x)que tem como argumento umarray xde números reais e que devolve umarraycom os valores por ordem crescente.- Por exemplo
crescente([1, -2.5, 1])devolve[-2.5, 1, 1].
- Por exemplo
- Escreva uma função
estender(x, n)que tem como argumento umarray xde números reais e um valor inteirone que devolve umarrayexatamente de comprimenton. Se o comprimento dexfor menor quendevem ser acrescentados zeros suficientes. Se o comprimento dexfor maior quenos valores a mais são descartados.- Por exemplo
estender([1, -2.5], 4)devolve[1, -2.5, 0, 0], eestender([1, 6.25, 0.16], 2)devolve[1, 6.25].
- Por exemplo
- Escreva uma função
mapa(f, x)que tem como argumentos uma funçãof: float -> floate umarray xde números reais e que devolve umarraycom númerosyi = f(xi)em quex = [ ..., xi, ...].- Por exemplo
mapa(x => 2 * x, [1, 2.1, 4, 5, -2, 3])devolve[2, 4.2, 8, 10, -4, 6]. Quais das alíneas acima consegue tornar a resolver usando esta função?
- Por exemplo
Combinações
Funções que combinam uma ou várias coleções numa coleção nova.
Por exemplo:
const descending_numbers = numbers.reverse();
// [4, 3, 2, 1]
const seesaw = numbers.concat(descending_numbers);
// [1, 2, 3, 4, 4, 3, 2, 1]
-
Escreva uma função
inverte(x)que tem como argumentos oarray xde números reais e que devolve umarraycom os valores dexpor ordem inversa (do último para o primeiro). -
Assegure-se que
x = cadeia(cabeca(n, x), cauda(n, x))para qualquerxe qualquern, em que:- A função
cadeia(x, y)tem como argumentos doisarray x, yde números reais e devolve umarraycom os valores dexseguidos pelos valores dey.- Por exemplo
cadeia([1, 2.1, 4], [5, -2, 3])devolve[1, 2.1, 4, 5, -2, 3].
- Por exemplo
- A função
cabeca(n, x)tem como argumentos oint ne oarray xde números reais e devolve oarraydos primeirosnvalores dex. - A função
cauda(n, x)tem como argumentos oint ne oarray xde números reais e devolve oarraycom os valores dexa partir don-ésimo elemento.
- A função
-
Escreva uma função
somar(x, y)que tem como argumentos doisarray x, yde números reais e que devolve umarraycom os valores dexsomados aos valores deypela mesma ordem. Se os argumentos tiverem comprimentos diferentes o resultado deve ser a lista vazia:[].- Por exemplo
somar([1, 2.1, 4], [5, -2, 3])devolve[6, 0.1, 7]esomar([1, 2], [3])devolve[].
- Por exemplo
-
Escreva uma função
emparelhar(x, y)que tem como argumentos doisarray x, yde números reais e que devolve umarraycom objetos{x: xi, y: yi}ondexi, yiestão nas mesmas posições dex, y. Se os argumentos tiverem comprimentos diferentes o resultado deve ser a lista vazia:[].- Por exemplo
emparelhar([1, 2.1, 4], [5, -2, 3])devolve[{x: 1, y: 5}, {x: 2.1, y: -2}, {x: 4, y: 3}]eemparelhar([1, 2], [3])devolve[]. Consegue usar a funçãomapado exercício anterior para resolver esta alínea?
- Por exemplo
Reduções
Funções que reduzem uma coleção a um valor.
Por exemplo:
const numbers_count = numbers.length;
// 4
Math.min(...numbers);
// 1
- Escreva uma função
conta(x)que tem como argumento umarray xde números reais e que devolve o comprimento doarray.- Por exemplo
conta([1, 2, 3, 4])devolve4.
- Por exemplo
- Escreva uma função
soma(x)que tem como argumento umarray xde números reais e que devolve a soma desses números.- Por exemplo
soma([1, 2, 3, 4])devolve10.
- Por exemplo
- Escreva uma função
media(x)que tem como argumento umarray xde números reais e que devolve a média desses números.- Por exemplo
media([1, 2, 3, 4])devolve2.5.
- Por exemplo
- Escreva uma função
max(x)que tem como argumento umarray xde números reais e que devolve o maior desses números.- Por exemplo
max([1, 2, 3, 4])devolve4.
- Por exemplo
- Escreva uma função
min(x)que tem como argumento umarray xde números reais e que devolve o menor desses números.- Por exemplo
min([1, 2, 3, 4])devolve1.
- Por exemplo
- Escreva uma função
stats(x)que tem como argumento umarray xde números reais e que devolve um sumário estatístico desses valores: um objeto com atributoscount, mean, stdev, min, max. O atributocounté o comprimento dex, os valores demean, min, maxresultam das alíneas anteriores estdev(o desvio padrão) pode ser calculado pela fórmula $$\textrm{stdev}(x) = \sqrt{\frac{1}{n - 1}\sum (x_i - m)^2}$$ onde $n$ é a dimensão do vetor e $m$ a sua média.- Por exemplo
stats([1, 2, 3, 4])devolve{count: 4, mean: 2.5, stdev: 1.291, min: 1, max: 4}.
- Por exemplo
Álgebra Linear
Métodos numéricos fundamentais para a computação gráfica.
Por exemplo:
Um segmento pode ser definida por dois pontos, $A = (a_x, a_y)$ e $B = (b_x, b_y)$. O comprimento deste segmento resulta do produto interno através da fórmula
$$ \overline{AB} = \lVert B - A \rVert = \sqrt{(B - A) \cdot (B - A)}= \sqrt{(b_x - a_x)^2 + (b_y - a_y)^2} $$
- Escreva uma função
dot(x, y)que tem como argumentos doisarray x, yde números reais e que devolve o produto interno dos vetores $x$ e $y$. O produto interno de $x = (x_1,\ldots, x_n)$ e $y = (y_1,\ldots, y_n)$ é $$ x \cdot y = \sum x_i y_i $$ Se os argumentos tiverem comprimentos diferentes o resultado deve ser a lista vazia:[].- Por exemplo
dot([1, 2, 3], [4, 5, 6])devolve32. Torne a resolver esta alínea usando as alíneas e exercícios anteriores.
- Por exemplo
- Escreva uma função
norma(x)que tem como argumento umarray xde números reais e que devolve a norma do vetor $x$.- Por exemplo
norma([1, 1])devolve1.4142135624. Lembre-se que a norma de um vetor $x = (x_1,\ldots, x_n)$ é $$\lVert x \rVert = \sqrt{\sum x_i^2} = \sqrt{x \cdot x}. $$
- Por exemplo
Exercícios 2D
Reveja a matéria de Álgebra Linear e de Geometria Analítica.
Geometria 2D
| Distância de um ponto a uma reta |
|---|
 |
- A distância ($\color{seagreen}{d}$) entre o ponto vermelho ($\color{crimson}{A}$) e a reta azul é a distância entre o ponto vermelho ($\color{crimson}{A}$) e o ponto azul ($\color{steelblue}{B}$).
- O ponto azul ($\color{steelblue}{B}$) é a interseção entre a reta azul e a reta verde tracejada.
- A reta verde tracejada tem equação paramétrica $\color{seagreen}{X = A + \lambda u}$; falta determinar o vetor $u$.
- O vetor $u$ da reta verde tracejada é perpendicular ao vetor $v$ da equação paramétrica reta azul ($\color{steelblue}{X = B + \lambda v}$): $$u = (u_x, u_y) = (-v_y, v_x)$$
Exercício 1
Considere a equação paramétrica da reta, $X = P + \lambda v$.
Suponha que são dados dois pontos, $A = (a_x, a_y)$ e $B=(b_x, b_y)$.
Determine os valores dos parâmetros $P, v$ da reta que passa em $A, B$ e tais que:
- $A = P + \lambda v$ quando $\lambda = 0$ e
- $B = P + \lambda v$ quando $\lambda = 1$.
Exercício 2
Escreva uma expressão matemática para definir:
- Os segmentos de reta $(0,0) - (0,1)$, $(0,0) - (1,0)$ e $(0,0) - (1,1)$.
- O triângulo de vértices $(0,0) - (0,1) - (1,0)$.
- O quadrado $(0,0) - (1,0) - (1,1) - (0,1)$.
- O interior do quadrado e triângulo anteriores.
Exercício 3
Encontre os valores dos parâmetros da equação paramétrica:
- Da reta:
- Que passa nos pontos $(0,0)$ e $(0,1)$.
- Que passa nos pontos $(0,0)$ e $(1,0)$.
- Que passa nos pontos $(0,0)$ e $(1,1)$.
- Da reta com equação algébrica:
- $2x + 3y - 4 = 0$.
- $3x - 2y - 4 = 0$.
- $4x + 6y - 8 = 0$.
- Da circunferência:
- Centrada em $(0,1)$ e de raio $2$.
- Centrada em $(1,0)$ e de raio $2$.
- Centrada em $(1,1)$ e de raio $2$.
- Centrada em $(0,1)$ e que passa no ponto $(0,0)$.
- Centrada em $(1,0)$ e que passa no ponto $(0,0)$.
- Centrada em $(1,1)$ e que passa no ponto $(0,0)$.
Programação 2D
Reveja a programação, em particular a linguagem
JavaScript.
Exercício 4
Calcule os parâmetros $A, B, C$ da equação algébrica da reta ($Ax + By + C = 0$), dadas as coordenadas $(x_1, y_1), (x_2, y_2)$ de dois pontos.
- Implemente a função
eqna_s(x1, y1, x2, y2)que devolve um objeto com atributos{A, B, C}. - Em que casos é que as entradas
x1, y1, x2, y2não definem uma reta? No seu código detete esse caso e devolvanull. - Em que casos é que $A_1, B_1, C_1$ define a mesma reta que $A_2, B_2, C_2$? Implemente uma função
equala_ss(A1, B1, C1, A2, B2, C2)que devolvetruese os parâmetros definem a mesma reta efalsecaso contrário.
Exercício 5
Calcule os parâmetros $P, v$ da equação paramétrica da reta ($X = P + \lambda v$), dadas as coordenadas $(x_1, y_1), (x_2, y_2)$ de dois pontos.
- Implemente a função
eqnp_s(x1, y1, x2, y2)que devolve um objeto com atributos{P, v}. - Em que casos é que as entradas
x1, y1, x2, y2não definem uma reta? No seu código detete esse caso e devolvanull. - Em que casos é que os parâmetros $P_1, v_1$ definem a mesma reta que os parâmetros $P_2, v_2$? Implemente uma função
equalp_ss(P1, v1, P2, v2)que devolvetruese os parâmetros definem a mesma reta efalsecaso contrário.
Exercício 6
Implemente uma função
dot(x1, y1, x2, y2)para calcular o produto interno $$(x_1, y_1) \cdot (x_2, y_2) = x_1 x_2 + y_1 y_2$$
Use essa função para implementar funções para calcular:
- O comprimento de um vetor,
length_v: $|v| = \sqrt{v\cdot v}$. - A distância entre dois pontos,
dist_pp: $d(A,B) = | B - A |$. - A distância de um ponto a uma reta,
dist_ps. Sugestão: Use a equação paramétrica da reta. - O «reflexo» de um ponto por uma reta,
mirror_ps. - O «reflexo» de uma reta por outra reta,
mirror_ss. - Se duas retas são perpendiculares,
are_perp.
Exercício 7
Pode gerar pontos de uma circunferência usando uma equação paramétrica.
Implemente a função points_c(x1, y1, r, n) que gera uma lista com $n$ pontos equidistantes da circunferência de centro $(x_1, y_1)$ e raio $r$.
Use a função points_c para estimar a distância de uma circunferência a:
- Um ponto:
edist_cp. - Uma reta:
edist_cl. - Outra circunferência:
edist_cc.
Exercício 8
Pode gerar pontos de um segmento de reta usando os dois extremos do segmento e uma equação paramétrica.
Implemente a função points_s(x1, y1, x2, y2, n) que gera uma lista com $n$ pontos equidistantes do segmento limitado pelos pontos $(x_1, y_1)$ e $(x_2, y_2)$. Sugestão: Use a equação vetorial da reta:
$$
(x,y) = (x_1, y_1) + \lambda ( x_2 - x_1, y_2 - y_1 )
$$
Estime a distância de um segmento de reta a:
- Um ponto:
edist_sp. - Outro segmento de reta:
edist_ss. - Uma circunferência:
edist_sc. Suponha que esta circunferência:- Está definida por centro e raio.
- Está aproximada por um conjunto de pontos.
Exercício 9
A forma de representar as coordenadas dos pontos usada acima é muito «trapalhona».
Em vez de usar x1, y1 (ou outros indíces) use listas, P1 = [x1, y1], para representar pontos. Atualize todas as funções anteriores.
Por exemplo, x = dot(P, Q).
Exercício 10
Pode obter formas simples usando apenas conjuntos de pontos para definir o contorno do objeto gráfico.
Implemente:
-
A função
join(A, B)em queAeBsão listas de pontos e que devolve a lista que resulta de acrescentar os pontos deBa seguir aos pontos deA. -
A função
frame(A)que calcula os cantos superior esquerdo e inferior direito dos pontos emA, isto é, a moldura para os pontos deA. -
A função
min_circ(A)que calcula a menor circunferência que contém todos os pontos deA. Resolva em duas versões: uma que devolve o centro e o raio da circunferência e outra que devolve uma aproximação com $n$ pontos.
Exercício 11
Pode transformar pontos usando as operações da álgebra linear.
Implemente a função [x1, y1, z1] = dot_mv(a,b,c,d,e,f,g,h,i,x0,y0,z0) que calcula
$$\begin{bmatrix}
x_1 \cr
y_1 \cr
z_1
\end{bmatrix} =
\begin{bmatrix}
a & b & c \cr
d & e & f \cr
g & h & i
\end{bmatrix}
\begin{bmatrix}
x_0 \cr
y_0 \cr
z_0
\end{bmatrix}.
$$
Esta forma de representar matrizes e vetores é muito «trapalhona».
Represente os vetores por listas, v = [x, y, z], e as matrizes por listas de listas,
A = [[a, b, c], [d, e, f], [g, h, i]]. Note que A[0] é a primeira linha de A.
Deve ficar com uma função X1 = dot_mv(A, X0).
Exercício 12
Implemente funções para gerar matrizes e calcular operações comuns.
- A matriz
zeros(n,m)tem $n$ linhas, $m$ colunas e todas as entradas são $0$. - Na matriz
ones(n, m)tem $n$ linhas, $m$ colunas e todas as entradas são $1$. - A matriz
eye(n)é a matriz identidade de ordem $n$. - A função
t(A)é a matriz transposta de $A$. - A função
sum_mm(A, B)soma as matrizes $A$ e $B$. Se as dimensões forem incompatíveis, devolvenull. - A função
dot_mm(A, B)multiplica as matrizes $A$ e $B$. Se as dimensões forem incompatíveis, devolvenull. - A função
translate(dx, dy)devolve a matriz da translação por $(dx, dy)$. - A função
rotate(alpha)devolve a matriz da rotação por $\alpha$ radianos. - A função
scale(sx, sy)devolve a matriz da escala por $(sx, sy)$.
Exercício 13
Use a biblioteca de funções que definiu acima para construir e transformar (aproximações) de circunferências e de segmentos.
Visualize as formas originais (a verde) e transformadas (a vermelho) nos sistemas C2D e SVG.
Exercício 14
Implemente a regra par-ímpar de enchimento de formas.
Suponha que F é um conjunto de pontos que aproxima uma figura 2D:
- Defina a função
sort_h(F)que devolve os pontos deFordenados da esquerda para a direita (isto é, primeiro os pontos com menor coordenadax). - Defina a função
strip_h(F, y0, e)que devolve os pontos deFque estão numa faixa horizontal, isto é os pontos deFcuja coordenada $y$ é tal que $\left| y - y_0 \right| \leq e$. Se não existirem pontos assim emF, devolve a lista vazia. - Defina a função
first_left(F)que devolve o ponto mais à esquerda deF. SeFfor uma lista vazia devolvenull. - Defina a função
next_right(F, x0)que devolve o ponto deFque, de todos os pontos deFcom coordenadaxmaior quex0, é o que tem menor coordenadax. Se não existir tal ponto devolvenull. - Use as funções
sort_h, strip_h, first_leftenext_rightpara definir a funçãofill_evenodd(F, ...), que implementa a regra par-ímpar por faixas horizontais.- O resultado deve ser uma lista com os segmentos horizontais interiores, sendo cada segmento definido por dois pontos.
- Considere ainda que argumentos são úteis e/ou necessário e como detetar e assinalar potenciais erros.
Exercício 15
Visualize o preenchimento de formas pela regra par-ímpar.
Use vermelho para a forma e verde para o interior. Resolva esta alínea para os sistemas C2D e SVG.
Exercício 16
Visualize o interior da forma usando os sistemas
C2DeSVGcom:
- Um gradiente horizontal com várias cores (pelo menos 3).
- Um gradiente vertical com várias cores (pelo menos 3).
- Um padrão xadrez.
Modelação 2D
Exercício 17
Escreva um programa que use o C2D para desenhar um caminho entre os pontos de coordenadas $(0,0)$ e $(64,64)$ que tenha um arco de raio 16.
Exercício 18
Escreva um programa javascript para o C2D que desenhe um círculo amarelo no meio de um retângulo 100x100 azul. Defina a mesma imagem com um documento SVG.
Exercício 19
Procure na internet: Qual é o intervalo dos comprimentos de onda das cores visíveis?
Exercício 20
Marque os seguintes pontos num referencial cartesiano e num referencial de ecrã (desenhados numa folha de papel): (1, 3), (-2, 1.5), (0, -2), (0, 0), (2, 1), (-1.5, 1.5), (3, -0.5).
Exercício 21
| Meia Lua | Yin-Yang |
|---|---|
 |  |
Escreva um programa para o C2D, e um documento SVG para desenhar:
- Uma meia lua (ver acima).
- Um quadrado centrado e rodado 45º.
- Um tabuleiro de xadrez.
- Um tabuleiro tri-colorido. Generalize para uma função que desenhe um tabuleiro $n$-colorido.
- → O símbolo oriental Yin-Yang (ver acima).
- Um retângulo pintado com um gradiente radial acíclico.
- Um retângulo pintado \com um gradiente radial cíclico.
- → Um octógono. Generalize para um $n$-ágono.
- → Uma estrela de cinco pontas. Generalize para $n$ pontas.
- Desenhe a bandeira da união europeia.
Exercício 23
Implemente uma função
grafico(f, n, a, b)para ajudar a desenhar o gráfico de uma função matemática.
- Esta função devolve $n$ pontos $(x_i, f(x_i))$ do gráfico da função $f: \mathbb{R} \to \mathbb{R}$, com as abcissas $x_i$ igualmente espaçadas entre $a$ e $b$ (e $x_0 = a, x_{n-1} = b$).
- Implemente funções para adaptar as listas $[(x_0, f(x_0)), \ldots, (x_{n-1}, f(x_{n-1}))]$ a caminhos
C2DeSVG.
Exercício 24
Implemente uma pequena biblioteca gráfica 2D.
Suponha que cada objeto gráfico é definido por:
- Um caminho, isto é uma lista de pontos
x, y. - Uma transformação com uma translação, uma rotação e uma escala.
- Propriedades de aspeto (
strokeefill).
Implemente uma função para desenhar estes objetos gráficos num
C2De para produzir um elementoSVG.
Exercícios 3D
Reveja a matéria de Álgebra Linear e de Geometria Analítica.
Geometria 3D
Exercício 1
Vetor Perpendicular 1
- Dados dois vetores 3D $u = (u_x, u_y, u_z)$ e $v = (v_x, v_y, v_z)$, como é que encontra um terceiro vetor $w=(w_x, w_y, w_z)$ perpendicular a ambos?
- Como é que adapta a resolução da alínea anterior para o caso em que, em vez de dois vetores, são dados três pontos 3D, $A=(A_x, A_y, A_z), B=(B_x, B_y, B_z)$ e $C=(C_x, C_y, C_z)$?
Exercício 2
Posições, direções e alvos
No sistema 3JS a iluminação SpotLight é definida por uma posição $p = (p_x, p_y, p_z)$ e um alvo $t = (t_z, t_y, t_z)$, de forma que o foco de luz fica posicionado em $p$ e aponta para $t$.
Já no sistema X3D o mesmo tipo de iluminação é definido por uma posição $p$ análoga à de cima mas, em vez dum alvo, usa uma direção $d = (d_x, d_y, d_z)$, de forma que o foco de luz fica posicionado em $p$ a aponta na direção $d$.
- Como obtém $d$ em função de $p$ e $t$ de forma que um raio emitido a partir da posição $p$ apontado ao alvo $t$ tem a direção $d$??
- Como obtém $t$ em função de $p$ e $d$ de forma que um raio emitido a partir da posição $p$ na direção $d$ atinge um alvo em $t$.
Programação 3D
Representação de Coordenadas. Nestes exercícios pontos e vetores 3D são representados por objetos
{x, y, z}de forma que o valor de cada atributo indica a respetiva cooredenada. Pontos e vetores 2D ficam representados por objetos{x, y}(ou{u, v}no caso de texturas).
Exercício 3
Operações 3D
- Implemente a função
sum(u, v)que calcula a soma de dois vetoresuev: $$ \mathrm{sum}(u, v) = u + v = (u_x + v_x, u_y + v_y, u_z + v_z) $$ - Implemente a função
scalar(a, u)que calcula o produto do escalarapelo vetorue use-a para definirminus(u)que calcula o simétrico do vetoru: $$ \begin{aligned} \mathrm{scalar}(a, u) &= au &&= (a \times u_x, a \times u_y, a \times u_z) \cr \mathrm{minus}(u) &= -u &&= \mathrm{scalar}(-1, u) \end{aligned} $$ - Implemente a função
inner(u, v)que calcula o produto interno de dois vetoresuev: $$ \mathrm{inner}(u, v) = u\cdot v = u_x \times v_x + u_y \times v_y + u_z \times v_z $$ - Implemente a função
norm(u)que calcula a norma do vetoru: $$ \mathrm{norm}(u) = \left| u \right| = \sqrt{u \cdot u } = \mathrm{sqrt}(\mathrm{inner}(u, u)) $$ - Implemente a função
dist(p, q)que calcula a distância entre dois pontospeq: $$ \mathrm{dist}(p, q) = \left| p - q \right| = \mathrm{norm}( \mathrm{sum}(p, \mathrm{minus}(q)) ) $$ - Implemente a função
vers(u)que calcula o versor do vetoru; o versor de $u$ é um vector $v$ com norma $\left| v \right| = 1$ e com a mesma direção de $u$: $$ \mathrm{vers}(u) = \frac{1}{\left| u \right|} u = \mathrm{scalar}\left( \frac{1}{\mathrm{norm}(u)}, u\right) $$ - A fórmula
$$u\cdot v = \left|u\right|
\left|v\right|\cos\alpha$$ permite obter $\alpha$, o ângulo entre $u$ e $v$. Implemente a funçãoangle(u, v)que calcula o ângulo entre dois vetoresuev: $$ \mathrm{angle}(u, v) = \arccos\left( \frac{u \cdot v}{ \left| u \right| \left| v \right|} \right) = \arccos\left( \frac{\mathrm{inner}(u, v)}{ \mathrm{norm}(u)\mathrm{norm}(v)} \right) $$ - Implemente a função
are_colin(u, v)que devolve o booleanotrueseuevforem co-lineares efalsecaso contrário. Os vetores $u$ e $v$ são co-lineares de existe um escalar $\lambda \not= 0$ tal que $v = \lambda u$: $$ \mathrm{are_colin}(u, v) = \mathrm{angle}(u, v) == 0 $$
Exercício 4
Produto Externo
Supondo que $w = u \otimes v$ é o produto externo de $u$ e $v$, então as componentes de $w$ podem ser calculadas por $$ w_x \mathbf{x} + w_y \mathbf{y} + w_z \mathbf{z} = \begin{vmatrix} \mathbf{x} & \mathbf{y} & \mathbf{z} \cr u_x & u_y & u_z \cr v_x & v_y & v_z \end{vmatrix} $$
- Implemente a função
outer(u, v)que calcula o produto externo entre dois vetores dados. - Implemente a função
perp(u, v)que calcula um vetor perpendicular a dois vetores dados. - Implemente a função
basis(u, v)que calcula uma base a partir deuev:- A função levanta uma exceção se
uevforem co-lineares. - Caso contrário devolve uma lista de três vetores
[a, b, c]em queaé o versor deu,bé o versor dev,cé um vetor de norma $1$ perpendicular aue av.
- A função levanta uma exceção se
Exercício 5
Conjuntos de Pontos
- Centro. Implemente a função
center(points)que calcula o centro de umarrayde pontos. - Próximo. Implemente a função
nearest(target, points)em quetargeté um ponto 3D epointsé umarrayde pontos 3D e que encontra o elemento depointsque está mais próximo detarget.- A sua função deve devolver um objeto com atributos
{d, p}em quedé a distância epo ponto mais próximo.
- A sua função deve devolver um objeto com atributos
- Afastado. Implemente a função
farthest(target, points)em quetargeté um ponto 3D epointsé umarrayde pontos 3D e que encontra o elemento depointsque está mais afastado detarget. Resolva de forma semelhante à alínea anterior. - «Mais Isolado». Implemente a função
loneliest(points)em quepointsé umarrayde pontos 3D e que encontra o ponto «mais isolado» de um conjunto de pontos. O ponto «mais isolado» é o que está mais distante do centro. - «Mais Central». Implemente a função
centralest(points)em quepointsé umarrayde pontos 3D e que encontra o ponto «mais central» de um conjunto de pontos. O ponto «mais central» é o que está mais perto do centro. - Canto Superior Direito Anterior. Implemente a função
corner_trf(points)(trf: top right front) em quepointsé umarrayde pontos 3D e que encontra o «canto superior direito anterior» (SDA) de um conjunto de pontos. As coordenadas do SDA são os valores máximos nos eixos $x$, $y$ e $z$. Por exemplo:let points = [ {x: -1, y: 2, z: 0}, {x: 20, y: 1, z: 3} ]; {x: 20, y: 2, z: 3} === corner_tlf(points); - Canto Inferior Esquerdo Posterior. Implemente a função
corner_llb(points)(lrb: lower left back) nos mesmos moldes do exercício anterior, substituindo o máximo pelo mínimo. - Pontos Mais Afastados. Implemente a função
most_apart(points)em quepointsé umarrayde pontos 3D e que encontra os dois elementos depointsque estão mais afastados um do outro. Isto é, se $p, q$ forem esses pontos então, dados quaisquer dois pontos $a$ e $b$ empointsentãodist(a,b) <= dist(p,q). - Pontos Menos Afastados. Implemente a função
least_apart(points)em quepointsé umarrayde pontos 3D e que encontra os dois elementos distintos depointsque estão menos afastados um do outro. Isto é, se $p, q$ forem esses pontos então, dados quaisquer dois pontos $a$ e $b$ empointsentãodist(a,b) >= dist(p,q).
Exercício 6
Processamento de Extrusões
Na construção de uma extrusão a secção percorre a espinha. Suponha que:
- A secção é definida por um
arrayde pontos 2D{x, z}(note que é usadoze nãoy). - A espinha é definida por um
arrayde vetores 3D{x, y, z}.
Estes dois parâmetros definem os vértices da geometria obtida por extrusão.
Mais concretamente, cada ponto p:{x, z} da secção e cada vetor v:{x, y, z} da espinha definem o vértice
q = {x: p.x + v.x, y: v.y, z: p.z + v.z} da extrusão.
Por exemplo, dados
const section = [
{x: 0.0, z: 0.0},
{x: 1.0, z: 0.0},
{x: 0.0, z: 1.0} ];
const spine = [
{x: 0.0, y: 0.0, z: 0.0},
{x: 0.0, y: 1.0, z: 0.0},
{x: 1.0, y: 2.0, z: -1.0} ];
o ponto
section[2] === {x: 0.0, z: 1.0}
e o vetor
spine[1] === {x: 0.0, y: 1.0, z: 0.0}
definem o vértice
{x: 0.0, y: 1.0, z: 1.0}
Escreva a função vertex(i, j, section, spine) que devolve as coordenadas xyz do vértice definido pelo i-ésimo ponto da secção e pelo j-ésimo passo da espinha.
- Por exemplo, usando as variáveis acima,
vertex(1, 2, section, spine)é o ponto 3D{x: 2.0, y: 2.0, z: -1.0}, que resulta do ponto{x: 1.0, z: 0.0}(com índicei = 1) e do vetor{x: 1.0, y: 2.0, z: -1.0}(com índicej = 2). - Assegure-se que
iejsão índices válidos. Se não, a função deve devolvernull.
Exercício 7
Posições, direções e alvos (em
JavaScript)
No sistema 3JS a iluminação SpotLight é definida por uma posição $p = (p_x, p_y, p_z)$ e um alvo $t = (t_z, t_y, t_z)$, de forma que o foco de luz fica posicionado em $p$ e aponta para $t$.
Já no sistema X3D o mesmo tipo de iluminação é definido por uma posição $p$ análoga à de cima mas, em vez dum alvo, usa uma direção $d = (d_x, d_y, d_y)$, de forma que o foco de luz fica posicionado em $p$ a aponta na direção $d$.
Escreva funções JavaScript de acordo com as seguintes especificações:
- Pontos e vetores são representados por objetos
{x, y, z}de forma que o valor de cada atributo indica a respetiva cooredenada. - A função
direction(p, t)devolve um vetordde forma que um raio emitido a partir da posiçãopapontado ao alvottem a direçãod = direction(p, t). - A função
target(p, d)devolve uma posiçãotde forma que um raio emitido a partir da posiçãopna direçãodatinge um alvo emt = target(p, d).
Modelação 3D
Resolva cada um destes exercícios usando as duas bibliotecas gráficas para 3D,
X3De3JS.
Exercício 8
Modelar um referencial.
Modele um referencial XYZ. Assegure-se que os eixos estão corretamente orientados e use o seguinte esquema de cores: X:red; Y:green; Z:blue.
Exercício 9
Modelar uma pirâmide.
Modele uma pirâmide usando uma geometria por faces.
Exercício 10
Modelar um frustum.
Um frustum (veja também o artigo na wikipédia) é um poliedro (isto é, um sólido com todas as faces planas) com duas das faces quadradas paralelas (o topo e a base).
Modele um frustum, usando uma geometria por faces, com altura 1, em que a base é um quadrado de lado 2 e o topo um quadrado de lado 1.
Exercício 11
Modelar um octaedro.
 |
|---|
| Octaedro |
Um octaedro é um dos cinco sólido platónicos (veja o artigo na wikipédia); tem oito faces triangulares e seis vértices:
$$ (0,1.5,0), (-1,0,1), (1,0,1), (1,0,-1), (-1,0,-1), (0,-1.5,0) $$
Modele um octaedro usando uma geometria por faces.
Exercício 12
Modelar um icosaedro.
 |
|---|
| Icosaedro |
Um icosaedro é um dos cinco sólido platónicos (veja o ) e tem os vértices seguintes:
$$ \begin{aligned} && (0,\phi,1) && (0,\phi,-1) \cr && (-\phi,1,0) && (\phi,1,0) \cr (1,0,\phi) && (1,0,-\phi) && (-1,0,-\phi) && (-1,0,\phi) \cr && (-\phi,-1,0) && (\phi,-1,0) \cr && (0,-\phi,-1) && (0,-\phi,1) \end{aligned} $$ onde $\phi = \frac{\sqrt{5} + 1}{2} \approx 1.62$.
Modele um icosaedro usando uma geometria por faces.
Exercício 13
Pintar uma pirâmide.
Modele uma pirâmide com as texturas de difusão, brilho e normais obtidas de imagens feitas ou encontradas por si. Seja realista.
Exercício 14
Pintar uma tenda.
Os vértices de uma tenda estão dados abaixo
$$ \begin{aligned} &(0.0, 1.5, 0.0)\cr\cr (-.7, 1.0, 0.7) && (0.7, 1.0, 0.7)\cr (0.7, 1.0, -.7) && (-.7, 1.0, -.7)\cr\cr (-1., 0.0, 1.0) && (1.0, 0.0, 1.0)\cr (1.0, 0.0, -1.) && (-1., 0.0, -1.) \end{aligned} $$
Modele uma tenda pintada com texturas feitas (ou encontradas) por si. Seja realista.
Exercício 15
Iluminar uma pirâmide e uma tenda.
Use os modelos da pirâmide e da tenda que construiu com texturas de difusão, reflexos e normais e ilumine-a com:
- Uma fonte “direcional”.
- Uma fonte “ponto”.
- Uma fonte “foco”.
No caso do sistema X3D desligue a iluminação “geral” colocando o seguinte elemento no nó <Scene>:
<NavigationInfo headLight="false"></NavigationInfo>
Exercícios Animação
Geometria 2D
Exercício 1 - Sistemas de Coordenadas
| Sistemas de Coordenadas |
|---|
 |
| Coordenadas Cartesianas $x$$y$ e Polares $d$$a$ |
Num referencial cartesiano cada ponto do plano (assinalado ●) é identificado por coordenadas cartesianas $x$ e $y$.
Esta não é a única forma de representar por números os pontos do plano. Outra forma —conveniente na animação do movimento— consiste em definir uma direção $a$ e uma distância $d$.
Considere um ponto no plano: $p = \textrm{cart}(x, y) = \textrm{polar}(d, a)$. Então:
$$ \begin{aligned} x &= d \cos{a} \cr y &= d \sin{a} \cr d &= \sqrt{x^2 + y^2} \cr a &= \arctan\left(- \frac{y}{x}\right) \end{aligned} $$
A última expressão tem alguns problemas de domínio pelo que, no JavaScript, existe uma função dedicada a esse cálculo, Math.atan2.
Implemente duas funções,
pol2cartecart2polpara passar de um referencial para o outro.
Tweens
Exceto quando indicado o contrário, cada exercício é para ser resolvido em
SVG,C2D,X3De3JS.
Exercício 2 - Percursos
Percursos
-
Percursos Lineares Uniformes. Desenhe uma forma simples (por exemplo, uma bola ou uma esfera azul) e desloque-a:
- 200 pixeis para a direita.
- Num retângulo com 200 pixeis de largura e 100 de altura.
- Num caminho poligonal com
npontos.
-
Percursos Curvos. Como é que representa percursos «curvos»? Por exemplo, percursos circulares ou em onda. Leve a forma do anterior a percorrer um percurso em forma de:
- Círculo.
- Seno (ondas).
- Curva
x^3. - Um caminho poligonal com
npontos, definido por uma equação paramétrica.
-
Percursos Compostos. Como é que representa percursos definidos por várias «partes»? Por exemplo, um percurso como ilustrado na figura seguinte:
-
Percursos Acelerados. Repita o exercício dos percursos compostos, mas a forma:
- Acelera no início de cada segmento e trava no fim.
- Acelera no início do percurso e trava no fim.
Comportamentos
Exercício 3 - Seguidor
Implemente um comportamento seguidor.
Este comportamento consiste em controlar a posição de um objeto, o seguidor, de forma a coincidir com a posição de outro, o líder.
A forma mais simples consiste em, simplesmente, igualar a posição do seguidor à do líder:
follow.pos.x = leader.pos.x;
follow.pos.y = leader.pos.y;
Desta forma o movimento é abrupto e irrealista.
Uma forma melhor consiste em estabelecer uma velocidade máxima para o seguidor e, em vez de coordenadas cartesianas, usar coordenadas polares para dirigir o seguidor na direção do líder.
Isto é, para movimentar um objeto podemos usar coordenadas cartesianas. Usando um modelo simples inspirado na física, temos
pos.x = pos.x + vel.x * dt;
pos.y = pos.y + vel.y * dt;
mas é mais conveniente definir a velocidade (e a aceleração) em coordenadas polares:
// Update vel in polar coordinates: direction and "speed".
vel.a = ... ; // direction
vel.d = ... ; // speed (rapidez)
...
// Convert the velocity from polar to cartesian coordinates.
vel_cart = pol2cart(vel);
// Apply the "usual" position update.
pos.x = pos.x + vel_cart.x * dt;
pos.y = pos.y + vel_cart.y * dt;
Alínea a.
Defina o movimento do líder de forma a percorrer os quatro cantos da tela.
Use tweens para que esse movimento seja “natural”.
Implemente o movimento do líder usando tweens de forma a reduzir a velocidade antes de mudar de direção e acelerar depois.
Alínea b.
Defina o movimento do seguidor em termos de direção $a$ e rapidez $d$.
Use um valor constante para a rapidez e para a direção calcule
a = Math.atan2(leader.y - follow.y, leader.x - follow.x)
em que o líder está na posição {x: leader.x, y: leader.y} e o seguidor em {x: follow.x, y: follow.y}.
Implemente o movimento do seguidor em termos de coordenadas polares para a velocidade.
Alínea c.
Em vez da velocidade do seguidor ser constante, é mais interessante se depender da distância ao líder.
Implemente o movimento do seguidor de forma a que a velocidade seja proporcional à distância ao líder.
Alínea d.
Transforme este exercício num jogo de “apanhada”.
Em vez do movimento do líder ser controlado por tweens, use o teclado para o movimentar.
O código seguinte mostra como detetar eventos do teclado e definir efeitos em função da tecla pressionada. Neste caso, a direção do movimento do líder.
document.addEventListener("keydown", (e) => {
switch (e.key) {
case "d": case "D": leader.action = 1; break; // RIGHT
case "a": case "A": leader.action = 2; break; // LEFT
default: leader.action = 0; break; // KEEP DIRECTION
}
});
Adapte este exemplo de forma a controlar o movimento do líder usando as teclas
dpara “rodar o volante” para a direita eapara “rodar o volante” para a esquerda.
Alínea e.
Adapte o que fez a todos os sistemas gráficos.
Se tiver cuidado durante a implementação das alíneas anteriores, consegue separar a lógica de processamento do modelo das instruções específicas do sistema gráfico que está a usar.
- Implemente uma “biblioteca” que faz toda a inicialização e atualização do modelo, independente de qualquer sistema gráfico.
- Implemente “adaptadores” para cada sistema gráfico (
SVG,C2D,X3De3JD).- Corra o “jogo” nos quatro sistemas em paralelo.
Exercício 4 - Bola Saltitona
Implemente uma bola saltitona.
Este comportamento consiste em movimentar uma bola num espaço limitado, aplicando (uma versão simplificada de) as leis da física:
Alínea a.
A posição $p$, a velocidade $v$ e a aceleração $a$ de um corpo estão relacionadas da seguinte forma: $$ \begin{aligned} a &= \frac{d}{dt} v &= \lim_{dt\to 0}\frac{v(t + dt) - v(t)}{dt} \cr v &= \frac{d}{dt} p &= \lim_{dt\to 0}\frac{p(t + dt) - p(t)}{dt} \end{aligned} $$
Se, em vez de $\lim_{dt \to 0}$, usarmos valores de $dt$ “muito pequenos” fica $$ \begin{aligned} a &= \frac{v(t + dt) - v(t)}{dt} \cr v &= \frac{p(t + dt) - p(t)}{dt} \end{aligned} $$ ou seja $$ \begin{aligned} v(t + dt) &= v(t) + a\times dt \cr p(t + dt) &= p(t) + v\times dt \end{aligned} $$
Estas equações permitem atualizar:
- A posição ($p(t + dt)$) a partir da posição anterior ($p(t)$) e da velocidade ($v$).
- A velocidade ($v(t + dt)$) a partir da velocidade anterior ($v(t)$) e da aceleração ($a$).
Ou seja, para descrever a evolução do movimento basta definir:
- A posição inicial.
- A velocidade inicial.
- A aceleração ao longo do tempo.
Implemente uma animação do movimento de uma bola usando as equações acima, dadas condições iniciais para a posição e velocidade e aceleração constante.
Alínea b.
Num espaço limitado há colisões, que afetam a velocidade da bola. Se a bola está a deslocar-se para a direita a velocidade é, por exemplo, $v = (1, 0)$. Mas se a bola colidir com uma parede, passa a deslocar-se para a esquerda: $v = (-1, 0)$.
Implemente a colisão com paredes verticais e horizontais dadas as dimensões do espaço.
Alínea c.
Há várias forças que afetam o movimento da bola:
A força gravítica está sempre a influenciar o movimento para “baixo”. Isso significa que a bola está sempre sujeita a uma aceleração $$ g = G(0, 1) $$ em que $G$ é uma constante positiva e $(0, 1)$ é o vector que aponta para “baixo”.
A resistência aerodinâmica está sempre a contrariar o movimento da bola. Portanto a bola está sempre sujeita a uma aceleração $$ r = -R ||v||^2 \mathrm{vers}(v) $$ em que $R$ é uma constante positiva, $||v||$ é a norma da velocidade e $\mathrm{vers}(v)$ o seu versor.
Implemente as acelerações gravítica e resistência aerodinâmica dadas as contantes $G$ e $R$.
Alínea d.
Quando há uma colisão (por exemplo, com uma parede) parte da energia cinética da bola perde-se. Isso significa que nessa ocasião é aplicada uma aceleração $$ c = -C ||v||^2 \mathrm{vers}(v) $$ em que $C$ é uma constante positiva.
Um pontapé aplica uma aceleração súbita à bola. Pode-se simular um pontapé registando a posição de um click no espaço da bola e aplicando uma aceleração (1) na direção do click e (2) com intensidade proporcional à distância entre a bola e o click.
Se a bola está na posição $p$ e é registado um click na posição $q$ então nessa ocasião a aceleração a aplicar é:
$$ k = K || q - p || \mathrm{vers}(q - p) $$
em que $K$ é uma constante positiva.
Implemente as acelerações das colisões e dos pontapés dadas as contantes $C$ e $K$.
Integrações
Exercício 5 - Sistemas Gráficos
Animação em todos os sistemas gráficos.
Adapte o exercício do seguidor aos quatro sistemas gráficos: C2D, SVG, 3JS e X3D.
Alínea a.
Escreva o código das funções de inicialização (init) e atualização (update) do modelo de forma independente de qualquer sistema gráfico.
Alínea b.
Para cada um dos sistemas gráficos, escreva uma função de construção do modelo (render) adequada.
Alínea c.
Integre tudo de forma a mostrar a animação simultânea do modelo nos quatro sistemas gráficos.
Exercício 6 - Contágio
Simule um contágio.
Considere uma população de indivíduos que se deslocam ao acaso num espaço $\left[0,1\right] \times \left[0, 1\right]$ — tanto o $x$ como o $y$ variam entre $0$ e $1$. Cada indivíduo pode estar num de três estados:
- Saudável ($S$): Não contagia os vizinhos; mobilidade normal.
- Contagioso ($C$): Contagia os vizinhos; mobilidade normal.
- Doente ($D$): Contagia os vizinhos; sem mobilidade.
em que:
- Um indivíduo com mobilidade normal desloca-se numa direção ao acaso.
- O estado de um indivíduo evolui de acordo com probabilidades de transição de estado definidas na seguinte tabela:
$$
\begin{array}{r|lll}
& S & C & D \cr
\hline
S & 1.0 & 0.0 & 0.0 \cr
C & 0.002 & 0.988 & 0.01 \cr
D & 0.001 & 0.02 & 0.989
\end{array}
$$
que descreve o seguinte:
- Um indivíduo saudável (linha $S$) permanece saudável.
- Um indivíduo contagioso (linha $C$) para para $S$ com probabilidade $0.002$;fica doente ($D$) com probabilidade $0.01$; permanece contagioso com a probabilidade restante.
- Um individuo doente (linha $D$) fica $S$, $C$ com probabilidade $0.001$, $0.02$ e $0.5$ respetivamente.
- O contágio é transmitido aos vizinhos; cada vizinho $S$ de um indivíduo $C$ ou $D$ a uma distância inferior a $0.02$ (do tamanho do espaço) pode ficar $C$ com probabilidade $0.5$.
Alínea a.
Escreva o código das funções de inicialização (init_model) e atualização (update) do modelo de forma independente de qualquer sistema gráfico.
Alínea b.
Adicione obstáculos.
Alínea c.
Acrescente um gráfico que mostra a evolução das populações $S/C/D$ ao longo do tempo.
Alínea d.
Acrescente inputs para os parâmetros da simulação: probabilidades de transição de estado; população inicial; distância de contágio; etc.
Recursos
Recursos C2D
Referências
- Norma em HTML Canvas 2D Context e WHATWG - HTML Living Standard.
- Documentação em Mozilla Developer Network.
- Tutorial em Mozilla Developer Network.
Modelos
Para documentos «pequenos», por exemplo, para testar uma função ou técnica, pode usar um único documento HTML com o código gráfico incluído.
Porém, se está a fazer um modelo gráfico mais complexo, deve separar o documento HTML do código JavaScript em vários ficheiros .
Um documento «standalone>
O código
JavaScriptestá incluído no documentoHTML.
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8" />
<script>
function main() {
let gc = document
.getElementById("acanvas")
.getContext("2d");
gc.fillStyle = "steelblue";
gc.fillRect(0,0,256,256);
}
</script>
</head>
<body>
<canvas id="acanvas">
<script>main();</script>
</canvas>
</body>
</html>
Código e Documento separados
O código
JavaScriptestá separado do documentoHTML.
Ficheiro HTML:
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8" />
<script src="prog.js">
</script>
</head>
<body>
<canvas id="c2d:canvas"></canvas>
<script>main("c2d:canvas");</script>
</body>
</html>
Ficheiro prog.js com código JavaScript:
function main(target_id) {
let gc = document
.getElementById(target_id)
.getContext("2d");
gc.fillStyle = "steelblue";
gc.fillRect(0,0,256,256);
}
Recursos SVG
Documentação
- Norma em Scalable Vector Graphics (SVG) 1.1 (Second Edition).
- Documentação em Mozilla Developer Network.
- Tutorial em W3C: An SVG Primer for Today’s Browsers.
- Lista de Nomes de Cores CSS.
Modelos Base
Para documentos «pequenos», por exemplo, para testar uma função ou técnica, pode usar um único documento SVG que pode ser visualizado em vários programas, incluindo browsers, o VSCodium, etc.
Porém, se o seu modelo gráfico faz parte de um documento HTML pode colocar o elemento SVG diretamente embebido no documento HTML.
Um documento «standalone»
Um modelo gráfico SVG pode ficar guardado num único ficheiro, com extensão svg, e ser visualizado por vários programas.
<!DOCTYPE svg PUBLIC
"-//W3C//DTD SVG 1.1//EN"
"http://www.w3.org/Graphics/SVG/1.1/DTD/svg11.dtd">
<svg width="..." height="..."
xmlns="http://www.w3.org/2000/svg"
xmlns:xlink="http://www.w3.org/1999/xlink">
<!-- conteúdo do documento SVG -->
</svg>
Um documento «embebido»
Num documento HTML (ou outro…), é possível embeber diretamente conteúdo SVG com:
<svg width="..." height="..."
xmlns="http://www.w3.org/2000/svg"
xmlns:xlink="http://www.w3.org/1999/xlink">
<!-- conteúdo do elemento SVG -->
</svg>
Recursos X3D
Documentação
- Norma em X3D® version 4 (X3D4) Architecture Specification.
- Documentação em Official x3dom Documentation.
- Tutorial em W3C: x3dom Tutorials.
- Versão estável mais recente (download).
Modelos
Os modelos abaixo funcionam assumindo que:
- Fez o download recomendado;
- O arquivo
zipfoi descompactado para a pastalib/da sua diretoria de trabalho;
Isto é, deve obter a seguinte àrvore:
(directoria de trabalho)/
lib/
x3dom/
doc/
(vários ficheiros)
(vários ficheiros)
x3dom.js
x3dom-full.js
x3dom.css
(os seus ficheiros de trabalho)
Um documento «standalone»
<!DOCTYPE html>
<html lang="pt">
<head>
<meta charset="utf8">
<title>Standalone X3D</title>
<script
type='application/javascript'
src='./lib/x3dom/x3dom-full.js'>
</script>
<link
rel='stylesheet'
type='text/css'
href='./lib/x3dom/x3dom.css' />
</head>
<body>
<X3D>
<Scene>
<Shape>
<Appearance>
<Material
diffuseColor="crimson">
</Material>
</Appearance>
<Cylinder></Cylinder>
</Shape>
</Scene>
</X3D>
</body>
</html>
Modelo e Documento separados
Parte HTML (Documento)
Ficheiro documento.html:
<!DOCTYPE html>
<html lang="pt">
<head>
<meta charset="utf8">
<title>Modelo + Documento X3D</title>
<script
type='application/javascript'
src='./lib/x3dom/x3dom-full.js'>
</script>
<link
rel='stylesheet'
type='text/css'
href='./lib/x3dom/x3dom.css' />
</head>
<body>
<div>
<X3D width="512px" height="512px">
<Scene>
<Inline url="modelo.x3d"></Inline>
</Scene>
</X3D>
</div>
</body>
</html>
Parte X3D (Modelo)
Ficheiro modelo.x3d:
<X3D>
<Scene>
<Shape>
<Appearance>
<Material diffuseColor="crimson">
</Material>
</Appearance>
<Cylinder></Cylinder>
</Shape>
</Scene>
</X3D>
Geometria por Faces
Geometria sem mapa UV
Uso simples de
IndexedFaceSet.
<Shape>
<Appearance>
<Appearance>
<Material diffuseColor="crimson">
</Material>
</Appearance>
</Appearance>
<IndexedFaceSet coordIndex="
[ FACES: indices dos VÉRTICES seguido de -1 para 'terminar' cada face ]
">
<Coordinate point="
[ VÉRTICES: coordenadas XYZ ]
">
</Coordinate>
</IndexedFaceSet>
</Shape>
Geometria com mapa UV
Veja como obter mapas de reflexos e de normais em NormalMap-Online.
<Shape>
<Appearance>
<CommonSurfaceShader>
<ImageTexture
containerField="diffuseTexture"
url="[mapa de DIFUSÃO]"></ImageTexture>
<ImageTexture
containerField="specularTexture"
url="[mapa de REFLEXOS]"></ImageTexture>
<ImageTexture
containerField="normalTexture"
url="[mapa de NORMAIS]"></ImageTexture>
</CommonSurfaceShader>
</Appearance>
<IndexedFaceSet coordIndex="
[ FACES: indices dos VÉRTICES seguido de -1 para 'terminar' cada face ]
"
texcoordIndex="
[ SETORES: indices dos PONTOS seguido de -1 para 'terminar' cada setor ]
">
<Coordinate point="
[ VÉRTICES: coordenadas XYZ ]
">
</Coordinate>
<TextureCoordinate point="
[ PONTOS: coordenadas UV ]
">
</TextureCoordinate>
</IndexedFaceSet>
</Shape>
Atalhos de teclado
| Função | Atalho |
|---|---|
| Camera mode | |
| Examine | Activate this mode by pressing the “e” key. |
| Function | Mouse Button |
| Rotate | Left / Left + Shift |
| Pan | Mid / Left + Ctrl |
| Zoom | Right / Wheel / Left + Alt |
| Set center of rotation | Double-click left |
| Camera mode | |
| Walk | Activate this mode by pressing the “w” key. |
| Function | Mouse Button |
| Move forward | Left |
| Move backward | Right |
| Camera mode | |
| Fly | Activate this mode by pressing the “f” key. |
| Function | Mouse Button |
| Move forward | Left |
| Move backward | Right |
| Camera mode | |
| Helicopter | Activate this mode by pressing the “h” key. |
| Function | Keys |
| look downwards/upwards | 8 / 9 |
| move higher/lower use the keys | 6 / 7 |
| Function | Mouse Button |
| Move forward | Left |
| Camera mode | |
| Look at | Activate this mode by pressing the “l” key. |
| Function | Mouse Button |
| Move in | Left |
| Move out | Right |
| Camera mode | |
| Game | Activate this mode by pressing the “g” key. |
| look around (rotate view) | move the mouse. |
| Function | Key |
| Move forward | Cursor up |
| Move backwards | Cursor down |
| Strafe left | Cursor left |
| Strafe right | Cursor right |
| Non-interactive camera mode | |
| Function | Key |
| Reset view | r |
| Show all | a |
| Upright | u |
| Debug | d |
| Viewpoint (debug) | v |
Recursos 3JS (aka three.js)
Referências
- Página: https://threejs.org
- Documentação em threejs.org.
- Manual em threejs.org.
- Exemplos em threejs.org.
- Downloads
- Para Computação Gráfica; ← recomendado!
- Do repositório oficial do threejs.org; (pode ser um ficheiro de tamanho substancial)
- Documentação
Javascriptrelevante:
Modelos
Os modelos abaixo funcionam assumindo que:
- Fez o download recomendado;
- O arquivo
zipfoi descompactado para a pastalib/da sua diretoria de trabalho;
Isto é, deve obter a seguinte àrvore:
(directoria de trabalho)/
lib/
threejs/
build/
(vários ficheiros)
addons/
jsm/
(vários ficheiros)
(os seus ficheiros de trabalho)
Um documento «standalone>
<!DOCTYPE html>
<html lang="en">
<head>
<title>3JS Embebido</title>
<meta charset="utf-8">
<script type="importmap">
{
"imports": {
"three": "./lib/threejs/build/three.module.js",
"three/addons/": "./lib/threejs/addons/jsm/"
}
}
</script>
</head>
<body>
<div id="3js:container">
</div>
<script type="module">
// Bibliotecas
import * as THREE from 'three';
import { OrbitControls } from 'three/addons/controls/OrbitControls.js';
// Elemento HTML com o modelo gráfico
const container = document.getElementById("3js:container");
container.width = 512;
container.height = 512;
// Construtor (Renderer) do modelo gráfico
const renderer = new THREE.WebGLRenderer( {alpha: true} );
renderer.setPixelRatio( window.devicePixelRatio );
renderer.setSize(
container.width,
container.height );
renderer.setClearColor("khaki", 0.25);
// Ligar elemento <-> construtor
container.appendChild(renderer.domElement);
// Câmara para observar o modelo
const camera = new THREE.PerspectiveCamera(
35, // abertura
container.width/container.height, // proporção largura/altura
0.1, // corte perto
10000 // corte longe
);
camera.position.set( -2.5, 0, 20 );
// Controlos da câmara
const controls = new OrbitControls(
camera,
renderer.domElement );
// Cena do modelo (raiz)
const scene = new THREE.Scene();
// Orientar a câmara para a cena
camera.lookAt(scene.position);
// Uma geometria (caixa)
const geometry = new THREE.BoxGeometry( 5, 5, 5 );
// Um material (cor)
const material = new THREE.MeshLambertMaterial( {color: "steelblue"} );
// Um objecto gráfico (geometria + material)
const mesh = new THREE.Mesh( geometry, material );
// Ligar cena <-> objecto gráfica
scene.add( mesh );
// Uma luz
const light = new THREE.AmbientLight( "white" );
// Ligar cena <-> luz
scene.add( light );
// Processo da animação
function animate() {
controls.update(); // Atualizar os controlos
mesh.rotation.y += 0.01; // Atualizar o modelo
renderer.render(scene, camera); // Construir a cena atualizada
}
renderer.setAnimationLoop( animate ); // Ligar animação <-> construtor
</script>
</body>
</html>
Código e Documento separados
Parte HTML (Documento)
Atenção ao seguinte:
A linha
"prog": "./prog.js"noimportmapdefine o nome"prog"para importar o código que está no ficheiro./prog.js.No segundo elemento
script:
- O tipo
module, necessário para se utilizar sistema de módulos daJavascript;- A instrução
import main from "prog":na primeira linha desse elemento: Esta instrução importa para este elemento o código referido pelo nome"prog"definido noimportmapacima.
Ficheiro doc.html:
<!DOCTYPE html>
<html lang="en">
<head>
<title>Modelo + Documento 3JS</title>
<meta charset="utf-8">
<script type="importmap">
{
"imports": {
"three": "./lib/threejs/build/three.module.js",
"three/addons/": "./lib/threejs/addons/jsm/",
"prog": "./prog.js"
}
}
</script>
</head>
<body>
<div id="3js:container">
</div>
<script type="module">
import main from "prog";
main("3js:container");
</script>
</body>
</html>
Parte Javascript (Programa)
Atenção: A declaração
export default fucntion main()(emprog.js) é necessária para permitir-se o acesso «externo» a esta função.
Ficheiro prog.js
// Bibliotecas
import * as THREE from 'three';
import { OrbitControls } from 'three/addons/controls/OrbitControls.js';
export default function main(container_id) {
// Elemento HTML com o modelo gráfico
const container = document.getElementById(container_id);
container.width = 512;
container.height = 512;
// Construtor (Renderer) do modelo gráfico
const renderer = new THREE.WebGLRenderer({ alpha: true });
renderer.setPixelRatio(window.devicePixelRatio);
renderer.setSize(
container.width,
container.height);
renderer.setClearColor("khaki", 0.25);
// Ligar elemento <-> construtor
container.appendChild(renderer.domElement);
// Câmara para observar o modelo
const camera = new THREE.PerspectiveCamera(
35, // abertura
container.width / container.height, // proporção largura/altura
0.1, // corte perto
10000 // corte longe
);
camera.position.set(-2.5, 0, 20);
// Controlos da câmara
const controls = new OrbitControls(
camera,
renderer.domElement);
// Cena do modelo (raiz)
const scene = new THREE.Scene();
// Orientar a câmara para a cena
camera.lookAt(scene.position);
// Uma geometria (caixa)
const geometry = new THREE.BoxGeometry(5, 5, 5);
// Um material (cor)
const material = new THREE.MeshLambertMaterial({ color: "steelblue" });
// Um objecto gráfico (geometria + material)
const mesh = new THREE.Mesh(geometry, material);
// Ligar cena <-> objecto gráfica
scene.add(mesh);
// Uma luz
const light = new THREE.AmbientLight("white");
// Ligar cena <-> luz
scene.add(light);
// Processo da animação
function animate() {
controls.update(); // Atualizar os controlos
mesh.rotation.y += 0.01; // Atualizar o modelo
renderer.render(scene, camera); // Construir a cena atualizada
}
renderer.setAnimationLoop(animate); // Ligar animação <-> construtor
}
Geometria por Faces
A classe central é a BufferGeometry.
Geometria sem mapa UV
function IndexedFaceSet(vertices, faces) {
//
// Geometry: "Indexed Face Set"
//
// Generate all the vertexes in the XYZ plane
const positions = [];
for (const i of faces) {
const xyz_point = vertices.slice(3 * i, 3 * i + 3);
positions.push(...xyz_point);
}
//
const geo = new THREE.BufferGeometry();
//
geo.setAttribute("position",
new THREE.Float32BufferAttribute(positions, 3));
//
geo.computeBoundingSphere();
//
return geo;
}
Geometria e Mapa UV
Veja como obter mapas de reflexos e de normais em NormalMap-Online.
O three.js suporta geometrias definidas por faces, e aplicação de texturas por mapas uv. A função seguinte define uma geometria por faces com um mapa UV.
function IndexedFaceUVSet(vertices, faces, points, sectors) {
//
// Geometry: "Indexed Face UV Set"
//
// Generate all the vertexes in the XYZ plane
const positions = [];
for (const i of faces) {
const xyz_point = vertices.slice(3 * i, 3 * i + 3);
positions.push(...xyz_point);
}
//
// Generate all the points in the UV plane
const uvs = [];
for (const i of sectors) {
const uv_point = points.slice(2 * i, 2 * i + 2);
uvs.push(...uv_point);
}
//
const geo = new THREE.BufferGeometry();
//
geo.setAttribute("position",
new THREE.Float32BufferAttribute(positions, 3));
geo.setAttribute("uv",
new THREE.Float32BufferAttribute(uvs, 2));
//
geo.computeVertexNormals();
geo.computeBoundingSphere();
//
return geo;
}
Textura com mapas de difusão, reflexos e normais
Os materiais do tipo MeshPhongMaterial suportam mapas de difusão, reflexos e normais.
const textureLoader = new THREE.TextureLoader();
const diffuseMap = textureLoader.load('[ mapa de DIFUSÃO ]');
const specularMap = textureLoader.load('[ mapa de REFLEXOS ]');
const normalMap = textureLoader.load('[ mapa de NORMAIS ]');
const material = new THREE.MeshPhongMaterial( {
map: diffuseMap,
specularMap: specularMap,
normalMap: normalMap
} );
Recursos Tween.js
Referências
- Documentação no repositório.
- Guia do Utilizador no repositório.
- Instalação
- Para Computação Gráfica ← recomendado!
- Instruções do repositório
Modelos
Os modelos abaixo funcionam assumindo que:
- Fez o download recomendado;
- O arquivo
zipfoi descompactado para a pastalib/da sua diretoria de trabalho;
Isto é, deve obter a seguinte árvore:
(directoria de trabalho)/
lib/
tweenjs/
(vários ficheiros)
(os seus ficheiros de trabalho)
Um documento «standalone>
O código
JavaScriptestá incluído no documentoHTML.
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8" />
<script type="importmap">
{
"imports": {
"tween": "./lib/tweenjs/tween.esm.js"
}
}
</script>
</head>
<body>
<div id="target"></div>
<script type="module">
import {Tween} from "tween";
const target = document.getElementById("target");
const value = { x: 0.0 };
const tween = new Tween(value)
.to({x: 10.0}, 5000)
.onUpdate(v => target.innerText = `Got: ${v.x.toPrecision(2)}` )
.yoyo(true)
.repeat(Infinity)
.start();
const step = () => {
tween.update();
requestAnimationFrame(step);
}
step();
</script>
</body>
</html>
Código e Documento separados
O código
JavaScriptestá separado do documentoHTML.
Ficheiro HTML:
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8" />
<script type="importmap">
{
"imports": {
"tween": "./lib/tweenjs/tween.esm.js",
"prog": "./prog.js"
}
}
</script>
</head>
<body>
<div id="target"></div>
<script type="module">
import main from "prog";
main("target");
</script>
</body>
</html>
Ficheiro prog.js com código JavaScript:
import { Tween } from "tween";
export { main as default };
function main(target_id) {
const target = document.getElementById(target_id);
const value = { x: 0.0 };
const tween = new Tween(value)
.to({ x: 10.0 }, 5000)
.onUpdate(v => target.innerText = `Got: ${v.x.toPrecision(2)}`)
.yoyo(true)
.repeat(Infinity)
.start();
const step = () => {
tween.update();
requestAnimationFrame(step);
}
step();
}
Uma Cadeia de Tweens
Ficheiro HTML:
<!doctype html>
<html>
<head>
<meta charset="utf-8" />
<script type="importmap">
{
"imports": {
"tween": "./lib/tweenjs/tween.esm.js",
"prog": "./tweens-chain.js"
}
}
</script>
</head>
<body>
<canvas id="tweens:target"></canvas>
<script type="module">
import main from "prog";
main("tweens:target");
</script>
</body>
</html>
Ficheiro tweens-chain.js com código JavaScript:
import { Tween, Group } from "tween";
export { main as default };
function draw(c, m) {
c.fillStyle = "khaki";
c.fillRect(0, 0, 512, 512);
c.fillStyle = "crimson";
c.fillRect(m.x, m.y, 32, 32);
}
function main(target_id) {
const context = document.getElementById(target_id).getContext("2d");
context.canvas.width = 512;
context.canvas.height = 512;
const model = { x: 8, y: 8 };
const right = new Tween(model).to({ x: 472 }, 1000);
const down = new Tween(model).to({ y: 472 }, 1000);
const left = new Tween(model).to({ x: 8 }, 1000);
const up = new Tween(model).to({ y: 8 }, 1000);
right.chain(down);
down.chain(left);
left.chain(up);
up.chain(right);
const group = new Group();
group.add(right, down, left, up);
right.start();
const step = () => {
group.update();
draw(context, model);
requestAnimationFrame(step);
};
step();
}
Exemplos
Seguidor Interativo
Controle um líder (o quadrado vermelho) usando as teclas
QAOPpara fugir de um seguidor (o quadrado azul) e evitar colidir com as paredes.
Este exemplo ilustra o ciclo de animação:
let model = init_model();
let context = new_context();
let step = (ts) => {
model.update(ts);
context.render(model);
requestAnimationFrame(step);
}
requestAnimationFrame(step);
Em particular, os seguintes pontos:
- Usar um modelo para controlar uma animação por passos.
- Atualizar o modelo em função de eventos «externos». Neste caso, eventos do teclado.
- Aplicar conversões entre coordenadas cartesianas e polares para facilitar o controlo do movimento de um objeto gráfico.
- Fazer o movimento em termos de aceleração, velocidade e posição.
O Modelo
Um modelo tem um estado inicial que é atualizado ao longo da animação.
- O modelo é inicializado na função
init_model— esta função define um objeto com os parâmetros necessários para a animação, mais alguns usados na visualização e acrescenta alguns métodos a esse objeto para tornar a programação da animação mais sistemática e ergonómica. - O modelo é atualizado em cada passo da animação através do método
update. - A evolução do modelo depende de eventos externos, que são detetados assincronamente e processados durante a atualização.
Estado Inicial
Na construção do estado inicial são definidos os atributos e métodos que definem o modelo.
Esta animação tem um leader controlado com o teclado, e um follower que procura «apanhar» o líder. Portanto, o modelo necessita de parâmetros e métodos para:
- Representar a posição das «personagens».
- Aplicar as ações que decorrem do teclado.
- Atualizar o modelo.
- Proporcionar propriedades de visualização como «cor» ou «tamanho»
Movimento
Para controlar o movimento dos objetos define-se uma posição
pos: {x:, y:}e uma velocidadevel: {x:, y:}.
function init_model() {
const model = {
age: 0,
leader: {
pos: { x: 8, y: 8 },
vel: { x: 0, y: 0 },
size: 16,
color: "crimson",
A: 1000,
},
follower: {
pos: { x: 128, y: 128 },
vel: { x: 0, y: 0 },
max_speed: 50,
size: 8,
color: "steelblue",
},
background: "khaki",
width: 256,
height: 256,
action: 0,
};
// Further model definitions
return model;
}
Adicionalmente, o modelo tem os seguintes atributos:
ageé o número de passos decorridos desde que a animação iniciou.background,widtheheightdefinem propriedades visuais da animação (côr de fundo, largura e altura).actionrepresenta a ação a ser executada no passo atual. Por exemplo, «subir», «descer», etc. — o valor deste parâmetro é definido assincronamente quando o utilizador pressiona uma tecla e posteriormente processado para definir a aceleração doleader.
Controlo por Teclado
O movimento do
leaderé controlado pelas teclasQAOP(oStem de ser evitado pois já é usado para fazer pesquisas).
Este controlo tem duas fases:
- Deteção assíncrona do evento de teclado;
- Atualização adequada do modelo, durante a fase
update.
Para a deteção assíncrona usa-se o método document.addEventListener (veja a respetiva documentação aqui):
function init_model() {
const model = {
...
};
document.addEventListener("keydown", (e) => {
switch (e.key) {
case "Q":
case "q": // UP
model.action = 1;
break;
case "A":
case "a": // DOWN
model.action = 2;
break;
case "P":
case "p": // RIGHT
model.action = 3;
break;
case "O":
case "o": // LEFT
model.action = 4;
break;
case "r":
case "R": // RESET
model.action = 5;
break;
default: // NOOP
model.action = 0;
break;
}
});
// Further model definitions
return model;
}
Esta instrução faz com seja executada uma certa ação cada vez que é pressionada ("keydown") alguma daquelas teclas (QAOP e R). Neste caso essa ação é apenas definir o valor do parâmetro model.action de forma que:
| Ação | Teclas | model.action |
|---|---|---|
| Subir | Qq | 1 |
| Descer | Aa | 2 |
| Direita | Pp | 3 |
| Esquerda | Oo | 4 |
| Reset | Rr | 5 |
| Nada | tudo o resto | 0 |
Aqui pretende-se apenas detetar e registar o evento externo. As instruções a executar neste passo devem evitar cálculos prolongados. Para o registo do evento usa-se o parâmetro
model.actionque será devidamente processado durante a atualização (update) do modelo.
Tempos e Atualização
Os restantes atributos do modelo representam (1) momentos «importantes» e (2) o método de atualização.
function init_model() {
const model = { ...
};
document.addEventListener("keydown", (e) => {...
});
model.start = performance.now();
model.last_ts = model.start;
model.update = update;
return model;
}
O atributo model.last_ts é atualizado em cada passo da animação e regista o momento em que esse passo foi executado. Esta informação é importante para determinar o tempo decorrido desde o passo anterior.
Atualização do Modelo
A atualização do modelo é implementada no método
updatee segue uma determinada sequência.
- Atualização dos tempos — deste o passo anterior; número de passos, etc.
- Aplicação das ações — o valor do parâmetro
model.actiondetermina a aceleração a aplicar aoleader. - Velocidade, posição e colisões do
leader— a aceleração aplicada vai determinar a velocidade e, esta, a posição. Porém, oleaderpode colidir com os limites do modelo, pelo que é necessário detetar essas colisões e fazer as correções apropriadas. - Velocidade e posição do
follower— a nova posição doleaderdetermina um novo rumo para ofollower; esse cálculo é mais simples usando coordenadas polares.
Programação por Objetos em JavaScript
Um aspeto importante da programação
JavaScripté o uso do termo reservadothise o uso de algumas caraterísticas de programação por objetos; nomeadamente, o uso de métodos.
Na linguagem JavaScript é possível acrescentar atributos e métodos a objetos:
const target = document.getElementById("js:oop");
function greet(prompt) { // "this" is a owner of this method.
target.innerText = `${prompt} ${this.name} ${this.surname}!`;
}
const person = { name: "John", age: 34 }; // Object
person.surname = "Doe"; // Add an attribute
person.greet = greet; // Add a method
person.greet("Hi there"); // Use the method
O aspeto chave deste exemplo é o uso do termo reservado this na definição da função/método greet — é uma referência ao objeto que tem esse método.
Atualização dos Tempos
Para a animação por passos é necessário que a função de atualização do modelo tenha como entrada informação sobre o tempo.
Neste caso é usado o protocolo do método requestAnimationFrame(callback) (documentação) em que a função callback tem um único argumento timestamp; o momento em que o callback está a ser executado pelo requestAnimationFrame.
let step = (ts) => {
model.update(ts);
context.render(model);
requestAnimationFrame(step);
}
requestAnimationFrame(step);
O método de atualização do modelo é:
function update(ts) {
this.age += 1;
const dt = 0.001 * (ts - this.last_ts);
this.last_ts = ts;
// Further update instructions
}
O argumento ts é o timestamp (carimbo temporal; «agora» em milisegundos) e as primeiras instruções tratam do progresso do tempo:
this.age += 1;incrementa a «idade» do modelo;- As restantes duas instruções determinam:
- O tempo decorrido deste o passo anterior (
dt). - Atualizam o registo do momento do passo
this.last_ts = ts.
- O tempo decorrido deste o passo anterior (
Aplicação de Ações (Eventos Externos)
Estas instruções usam a representação da ação,
this.actiondefinida durante a deteção de eventos, para atualizar o modelo.
function update(ts) {
// Previous instructions
const a = { x: 0, y: 0 };
switch (this.action) {
case 1: // UP
a.y = -1.0;
break;
case 2: // DOWN
a.y = 1.0;
break;
case 3: // RIGHT
a.x = 1.0;
break;
case 4: // LEFT
a.x = -1.0;
break;
case 5: // RESET
// Homework: Reset the model
break;
case 0:
default:
break;
}
this.action = 0; // Experiment: remove this instruction!
// More instructions
}
Neste caso a atualização consiste em aplicar uma aceleração ao leader. Essa aceleração é um vetor a = {x:, y:} que, consoante a ação, define um movimento para a esquerda, direita, cima ou baixo.
A instrução
this.action = 0; // Experiment: remove this instruction!
faz com que uma ação definida num passo de atualização fique limitada a esse passo.
Experimente remover esta instrução e observe o efeito no movimento do
leader.
Velocidade, Posição e Colisões do Líder
A ação
this.actiondefine a aceleração,a, a aplicar aoleader. Segue-se a atualização da velocidade e posição doleader, tendo em conta as leis do movimento e as colisões com os limites do modelo.
As leis do movimento são: $$ \left\lbrace \begin{aligned} v & \gets v + a \delta_t, \cr p & \gets p + v \delta_t \end{aligned} \right. $$
A atualização das componentes horizontais (x) é feita com as seguintes instruções:
function update(ts) {
// Previous instructions
//
// LEADER X update
//
// vel.x
this.leader.vel.x += this.leader.A * a.x * dt;
// pos.x
this.leader.pos.x += this.leader.vel.x * dt;
// collision with the right wall
if (this.leader.pos.x > this.width - this.leader.size) {
this.leader.pos.x = this.width - this.leader.size;
this.leader.vel.x = 0;
}
// collision with the left wall
if (this.leader.pos.x < 0) {
this.leader.pos.x = 0;
this.leader.vel.x = 0;
}
//
// LEADER Y update
//
// Analogous to LEADER X update
// More instructions
}
A atualização da posição horizontal começa no «bloco» LEADER X update:
- A aceleração horizontal atualiza a velocidade horizontal.
- A velocidade horizontal atualiza a posição horizontal.
- São testadas as colisões horizontais e, se necessário, ajustadas as velocidade e posição horizontais.
Mais especificamente, a linha
this.leader.vel.x += this.leader.A * a.x * dt;
atualiza a velocidade por aplicação da lei
$$ v \gets v + a \delta_t $$
usando a aceleração e o tempo decorrido: a.x * dt. O parâmetro this.leader.A serve apenas para aumentar o efeito da aceleração.
Experimente fazer
model.leader.A: 1na funçãoinit_modele observe o efeito no movimento doleader.
A atualização da posição horizontal é feita em
this.leader.pos.x += this.leader.vel.x * dt;
que aplica
$$ p \gets p + v \delta_t. $$
Esta atualização pode ter criado uma colisão com uma parede. As colisões (horizontais) são detetadas em
function update(ts) {
// Previous instructions
// collision with the right wall
if (this.leader.pos.x > this.width - this.leader.size) {
...
}
// collision with the left wall
if (this.leader.pos.x < 0) {
...
}
// More instructions
}
e, quando é detetada uma colisão, o leader:
- É parado (na direção da colisão):
this.leader.vel.x = 0;. - É colocado «dentro» da área do modelo:
this.leader.pos.x = ...;.
A atualização da velocidade e da posição verticais (
LEADER Y update) é análoga:
- A aceleração atualiza a velocidade.
- A velocidade atualiza a posição.
- São testadas as colisões e, se necessário, ajustadas a posição e a velocidade.
Velocidade e Posição do Seguidor
O
follower(seguidor) desloca-se na direção doleadermas tem a velocidade limitada a um valor máximo (model.follower.max_speed).
Portanto, para determinar em que direção o follower se desloca, assim como a sua velocidade, é mais conveniente usarem-se coordenadas polares. A conversão entre coordenadas cartesianas (usadas no modelo) e polares usa as seguintes funções:
function cart2polar(p) {
return {
a: Math.atan2(p.y, p.x),
d: Math.hypot(p.x, p.y),
};
}
function polar2cart(q) {
return {
x: q.d * Math.cos(q.a),
y: q.d * Math.sin(q.a),
};
}
A direção (cartesiana) do ponto p para o ponto q e a respetiva distância são:
function dir(p, q) {
return {
x: q.x - p.x,
y: q.y - p.y,
};
}
function dist(p, q) {
return Math.hypot(q.x - p.x, q.y - p.y);
}
Agora a atualização da velocidade e posição do seguidor é:
function update(ts) {
// Previous instructions
// FOLLOWER
//
// Heading
const follower_heading_cart = dir(this.follower.pos, this.leader.pos);
const follower_heading_pol = cart2polar(follower_heading_cart);
//
// Speed proportional to distance to leader
// but limited by this.follower.max_speed
follower_heading_pol.d = Math.min(
this.follower.max_speed,
dist(this.follower.pos, this.leader.pos),
);
//
// Cartesian vel
this.follower.vel = polar2cart(follower_heading_pol);
//
// Position update
this.follower.pos.x += this.follower.vel.x * dt;
this.follower.pos.y += this.follower.vel.y * dt;
}
Com a instrução
follower_heading_pol.d = Math.min(
this.follower.max_speed,
dist(this.follower.pos, this.leader.pos),
);
a velocidade fica proporcional à distância entre o follower e o leader mas limitada por model.follower.max_speed.
A Visualização
A visualização do modelo consiste na construção (render) de uma imagem em cada passo da animação.
Usa-se o sistema C2D (i.e. o CanvasRenderingContext2D), acrescentando métodos específicos para a construção deste modelo.
As propriedades gráficas das «peças» desta animação são definidas pelos atributos
{
pos: {x: ..., y: ... },
size: ... ,
color: ...,
}
Os métodos de visualização são:
function render_piece(c) {
this.fillStyle = c.color;
this.fillRect(c.pos.x, c.pos.y, c.size, c.size);
}
function render_c2d(m) {
this.write(`AGE: ${m.age}`);
this.fillStyle = m.background;
this.fillRect(0, 0, m.width, m.height);
this.render_piece(m.leader);
this.render_piece(m.follower);
}
O método
this.write(...)«ainda» não está definido. Este método serve para escrever mensagens de texto num «terminal» de forma a proporcionar alguma informação não visual sobre a evolução do modelo.
O sistema gráfico (e o modelo) é inicializado da seguinte forma:
function main(target_c2d, target_terminal) {
const model = init_model();
const context_c2d = document.getElementById(target_c2d).getContext("2d");
context_c2d.canvas.width = model.width;
context_c2d.canvas.height = model.height;
context_c2d.render = render_c2d;
context_c2d.render_piece = render_piece;
const terminal = document.getElementById(target_terminal);
context_c2d.write = (text) => (terminal.innerHTML = text);
// More instructions
}
A instância context_c2d é aumentada com os métodos seguintes:
...
context_c2d.render = render_c2d;
context_c2d.render_piece = render_piece;
...
context_c2d.write = (text) => (terminal.innerHTML = text);
...
que proporcionam:
- A construção (render) do modelo:
context_c2d.render. - A construção (render) de cada «peça»:
context_c2d.render_piece. - Um sistema de mensagens de texto:
context_c2d.write.
O Ciclo de Animação
O ciclo de animação inclui a atualização seguida da visualização do modelo e é definido pela função
step.
function main(target_c2d, target_terminal) {
// Previous instructions
const step = function (ts) {
model.update(ts);
context_c2d.render(model);
requestAnimationFrame(step);
};
requestAnimationFrame(step);
}
- A instrução
model.update(ts);usa o métodoupdateacrescentado amodeleminit_model; - Em
context_c2d.render(model)o modelo é visualizado pelos métodos acrescentados ao contexto gráficocontext_c2d. - A primeira instrução
requestAnimationFrame(step);torna a executar a funçãostepquando o browser atualizar a página. - A segunda instrução
requestAnimationFrame(step);inicia a animação.
A Parte HTML
A animação «existe» num documento
HTML.
<script type="importmap">
{
"imports": {
"tween": "./lib/tweenjs/tween.esm.js",
"follower": "./follower.js"
}
}
</script>
<div style="display: grid; grid-template-columns: 256px 256px">
<canvas id="c2d:canvas"></canvas>
<div id="terminal" style="font-family:monospace;padding:0.5em;background:black;color:seagreen">TERMINAL</div>
</div>
<script type="module">
import main from "follower";
main("c2d:canvas", "terminal");
</script>
O Que Falta (Exercícios)
- Adicione «energia» ao
leader: cada vez que colide com uma parede perde alguma energia; se for «apanhado» pelo seguidor perde mais energia; - Aumente a dificuldade: Adicione novos seguidores de
xemxsegundos; - Acrescente PowerUps: O contrário dos seguidores; fogem do
leadermas dão pontos quando «apanhados». - Junte «obstáculos»: objetos estacionários e incontornáveis que tornam a vida do
leadermais interessante. - Implemente adaptações para outros sistemas gráficos sem alterar o modelo.
Visualizações Simultâneas
Visualize simultaneamente um modelo em vários sistemas gráficos.
Este exemplo ilustra a animação de um modelo em quatro sistemas gráficos:
const terminal = document.getElementById(target_terminal);
const write = (text) => {
terminal.innerText = text;
};
const model = init_model();
const context_c2d = new_context_c2d(target_c2d, model);
const context_svg = new_context_svg(objects_svg);
const context_x3d = new_context_x3d(objects_x3d);
const context_3js = new_context_3js(target_3js, model);
const step = function (ts) {
model.update(ts);
write(`AGE: ${model.age}`);
context_c2d.render(model);
context_svg.render(model);
context_x3d.render(model);
context_3js.render(model);
requestAnimationFrame(step);
};
requestAnimationFrame(step);
Em particular:
- O modelo usa um controlo por tempo (para o
leadervermelho) e um controlo por passos (para ofollowerazul). - O modelo é atualizado em cada passo da animação através do método
update. - A visualização é feita simultaneamente em quatro sistemas gráficos,
C2D,SVG,3JSeX3D. - Adicionalmente, aqui também se ilustra como organizar o código, separando-o por bibliotecas.
O Modelo
Este modelo é um exemplo simples que ilustra um controlo por tempo utilizando a biblioteca
Tweenjspara fazer interpolações (tweens) e também um controlo por passos.
- O modelo é inicializado na função
init_model— esta função define um objeto com os parâmetros necessários para a animação, mais alguns usados na visualização e acrescenta alguns métodos a esse objeto para tornar a programação da animação mais sistemática e ergonómica. - O modelo é atualizado em cada passo da animação através do método
update. - Esta animação tem um controlo por tempo (tweens) para a posição do
leadere também um controlo por passos para ofollower.
Estado Inicial
Pretende-se que o movimento do
leaderpercorra os quatro cantos do espaço e que ofollowero persiga, limitado a uma velocidade máxima.
- As posições, tanto do
leadercomo dofollowersão representadas pelos atributospos: {x:, y:}que usam coordenadas cartesianas. - Também são comuns outras propriedades gráficas, como o tamanho (
size) e cor (color). - O
leadernão precisa de velocidade porque a sua posição é diretamente controlada por tweens. - O
followerprecisa de velocidade porque o seu movimento é constantemente orientado para a posição doleader. Além disso, este movimento deve estar limitado a uma rapidez máxima,max_speed. - Também o modelo tem atributos gráficos para definir o tamanho da cena (
width,height) e a cor de fundo (background). - Finalmente,
ageé a «idade» do modelo, isto é, o seu número de passos (atualizações).
function init_model() {
const model = {
age: 0,
leader: {
pos: { x: 0, y: 0 },
size: 16,
color: "crimson",
},
follower: {
pos: { x: 246, y: 246 },
vel: { x: 0, y: 0 },
max_speed: 1000,
size: 8,
color: "steelblue",
},
background: "khaki",
width: 256,
height: 256,
};
// Further instructions
return model;
}
Controlo por Tempo
O movimento do
leaderé controlado por tempo; para esse efeito usa-se a bibliotecatween.js.
O leader deve deslocar-se pelos quatro cantos da cena, como neste exemplo.
function init_model() {
const model = { ... };
const duration_ms = 1000;
const easing = Easing.Cubic.InOut;
const right = new Tween(model.leader.pos)
.to(
{
x: model.width - model.leader.size,
y: 0,
},
duration_ms,
)
.easing(easing);
const down = new Tween(model.leader.pos)
.to(
{
x: model.width - model.leader.size,
y: model.height - model.leader.size,
},
duration_ms,
)
.easing(easing);
const left = new Tween(model.leader.pos)
.to({ x: 0, y: model.height - model.leader.size }, duration_ms)
.easing(easing);
const up = new Tween(model.leader.pos)
.to({ x: 0, y: 0 }, duration_ms)
.easing(easing);
right.chain(down);
down.chain(left);
left.chain(up);
up.chain(right);
right.start();
const group = new Group();
group.add(right, down, left, up);
model.leader.tween = group;
// Further instructions
return model;
}
- O grupo de tweens é adicionado a
modelno atributomodel.leader.tween. - Posteriormente, durante a atualização, esse grupo será atualizado de forma a controlar a posição do
leader.
Tempos e Atualização
Os restantes atributos do modelo representam (1) momentos «importantes» e (2) o método de atualização.
function init_model() {
const model = { ...
};
// Previous instructions
model.start = performance.now();
model.last_ts = model.start;
model.update = update;
return model;
}
O atributo model.last_ts é atualizado em cada passo da animação e regista o momento em que esse passo foi executado. Esta informação é importante para determinar o tempo decorrido desde o passo anterior.
Atualização do Modelo
A atualização do modelo é implementada no método
updatee segue uma determinada sequência.
- Atualização dos tempos — deste o passo anterior; número de passos, etc.
- Atualização dos tweens para controlo da posição do
leader. - Velocidade e posição do
follower— a nova posição doleaderdetermina um novo rumo para ofollower; esse cálculo é mais simples usando coordenadas polares.
Atualização dos Tempos
function update(ts) {
this.age += 1;
const dt = 0.001 * (ts - this.last_ts);
this.last_ts = ts;
// Further instructions
}
O argumento ts é o timestamp (carimbo temporal) e é o instante (em milisegundos) de evocação do método update.
- As primeiras instruções tratam do progresso do tempo:
this.age += 1;incrementa a «idade» do modelo;- As restantes duas instruções determinam:
- O tempo decorrido deste o passo anterior (
dt). - Atualizam o registo do momento do passo
this.last_ts = ts.
- O tempo decorrido deste o passo anterior (
Atualização dos Tweens
A posição do
leaderé controlada pelo atributoleader.tween.
- Este atributo é um grupo de tweens definido na inicialização do modelo.
- Um grupo de tweens permite a atualização simultânea de todos os tweens nesse grupo.
function update(ts) {
// Previous instructions
this.leader.tween.update(ts);
// Further instructions
}
Com os tweens bem definidos na inicialização do modelo basta esta instrução para atualizar a posição do leader.
Velocidade e Posição do Seguidor
O
follower(seguidor) desloca-se na direção doleadermas tem a velocidade limitada a um valor máximo (model.follower.max_speed).
Este passo é idêntico ao exemplo seguidor interativo.
function update(ts) {
// Previous instructions
this.leader.tween.update(ts);
// FOLLOWER
//
// Heading
const follower_heading_cart = dir(this.follower.pos, this.leader.pos);
const follower_heading_pol = cart2polar(follower_heading_cart);
//
// Max speed
follower_heading_pol.d = Math.min(
this.follower.max_speed,
dist(this.follower.pos, this.leader.pos),
);
//
// Cartesian vel
this.follower.vel = polar2cart(follower_heading_pol);
//
// Position update
this.follower.pos.x += this.follower.vel.x * dt;
this.follower.pos.y += this.follower.vel.y * dt;
}
A Biblioteca do Modelo
Toda a funcionalidade que diz respeito ao modelo dve ficar «isolada» numa biblioteca, importando e exportando apenas o que for necessário.
Conteúdo do ficheiro model_grsystems.js
import { Tween, Easing, Group } from "tween";
export { init_model };
function cart2polar(p) { ... }
function polar2cart(p) { ... }
function dir(p, q) { ... }
function dist(p, q) { ... }
function init_model() {
...
return model;
}
function update(ts) {
...
}
- A primeira instrução importa a biblioteca
tweenporque são necessários tweens para o controlo da posição doleader. - A instrução
export { init_model };declara que a única função definida aqui que pode ser usada «fora» éinit_model. - As restantes linhas definem as várias funções e métodos de apoio a
init_model.
A função
init_modeldevolve o objetomodel; todos os atributos e métodos demodeldefinidos nessa função são acessíveis «fora» da biblioteca.
A Visualização
A visualização do modelo consiste na construção (render) de uma imagem em cada passo da animação, para cada um dos quatro sistemas gráficos
C2D,SVG,3JSeX3D.
Visualização C2D
No exemplo Seguidor Interativo já se definiu suporte para a visualização em
C2D, que também funciona para este modelo.
Para esta visualização falta «arrumar» a inicialização numa função (new_context_c2d) e agrupar «tudo» numa biblioteca (render_c2d.js):
export { new_context_c2d };
function render_c2d(m) { ... }
function render_char(c) { ... }
function new_context_c2d(target_c2d, model) {
const context = document.getElementById(target_c2d).getContext("2d");
context.render = render_c2d;
context.render_char = render_char;
context.canvas.width = model.width;
context.canvas.height = model.height;
return context;
}
Esta biblioteca exporta apenas a função new_context_c2d:
- O argumento
target_c2dé o identificador do elemento<canvas>onde esta visualização vai ser construída. - O argumento
modelserve para dimensionar esse<canvas>. - O objeto devolvido,
context, é um CanvasRenderingContext2D a que foram acrescentados os métodosrendererender_char.
Visualização SVG
A visualização usando o sistema
SVGdepende da existência de certos elementosSVGno documentoHTMLe agrupa esses elementos com funções para os inicializar e atualizar.
Elementos SVG
<svg id="svg:container" width="256px" height="256px">
<rect
id="svg:bg"
x="0"
y="0"
width="256"
height="256"
fill="khaki"
/>
<rect
id="svg:leader"
x="60"
y="60"
width="15"
height="15"
fill="crimson"
/>
<rect
id="svg:follower"
x="200"
y="200"
width="10"
height="10"
fill="steelblue"
/>
</svg>
No fragmento HTML acima estão identificados:
- O elemento
svgtemid="svg:container". - Os elementos
recttêm:id="svg:bg"para o fundo.id="svg:leader"para oleader.id="svg:follower"para ofollower.
Biblioteca para um «Contexto» SVG.
O «contexto»
SVGtem informação sobre quais são os elementos a atualizar (oleadere ofollower) e métodos para atualizar os respetivos atributos.
Para esta animação particular as identificações do leader e do follower, agrupados num único objeto, ficam:
const objects_svg = {
leader: "svg:leader",
follower: "svg:follower"
}
Este objeto tem a informação necessária para construir e atualizar um «contexto» SVG. Toda essa funcionalidade deve ficar agrupada numa biblioteca (render_svg.js):
export { new_context_svg };
function render_svg(m) {
this.leader.setAttribute("x", m.leader.pos.x);
this.leader.setAttribute("y", m.leader.pos.y);
this.follower.setAttribute("x", m.follower.pos.x);
this.follower.setAttribute("y", m.follower.pos.y);
}
function new_context_svg(objects_svg) {
return {
leader: document.getElementById(objects_svg.leader),
follower: document.getElementById(objects_svg.follower),
render: render_svg,
};
}
Esta biblioteca exporta apenas a função new_context_svg:
- O argumento
objects_svgtem a estrutura já ilustrada, com osiddos elementos a animar. - O objeto devolvido tem:
- Os elementos
leaderefolloweridentificados. - O método
render, que é executado pela funçãorender_svg.
- Os elementos
- A função
render_svg:- Tem argumento
m, um modelo («compatível»). - Usa as posições do
leadere dofollowerdo modelo (m.leader.posem.follower.pos) para atualizar as posições (os atributos"x"e"y") doleadere dofollowerdo contexto (this).
- Tem argumento
Visualização X3D
A visualização para o sistema
X3Dé muito semelhante à visualização paraSVGdado que estes dois sistemas definem a visualização com elementos integrados no documento (veja Document Object Model (DOM)).
Elementos X3D
Os objetos gráficos no X3D são posicionados (e rodados, dimensionados, etc.) usando elementos Transform. Portanto no X3D os objetos leader e follower são, de facto, Transform:
<X3D width="256px" height="256px">
<Scene>
<Background skyColor=".98 .98 .92"></Background>
<Transform id="x3d:leader" translation="-6 -6 0">
<Shape>
<Appearance>
<Material id="x3d:leader.material" diffuseColor="crimson"> </Material>
</Appearance>
<Box size="0.6 0.6 0.6"></Box>
</Shape>
</Transform>
<Transform id="x3d:follower" translation="0 0 0">
<Shape>
<Appearance>
<Material diffuseColor="steelblue"> </Material>
</Appearance>
<Box size="0.2 0.2 0.2"></Box>
</Shape>
</Transform>
</Scene>
</X3D>
Neste fragmento estão identificados os elementos Transform:
id="x3d:leader"para oleader.id="x3d:follower"para ofollower.
Limites Geométricos do Modelo e Sistemas 3D
As posições e as dimensões dos objetos do modelo estão em escalas significativamente diferentes das escalas típicas num sistema 3D.
O modelo existe num espaço 2D, com coordenadas x,y e limites 256x256. Num sistema gráfico 3D é necessária mais uma coordenada (z) e tipicamente os limites são menores (por exemplo, 10 x 10 x 10).
Por isso:
- As dimensões das geometrias acima são reduzidas:
<Box size="0.6 0.6 0.6"></Box>para oleader.<Box size="0.2 0.2 0.2"></Box>para ofollower.
- As funções que atualizarem as visualizações 3D terão de fazer um ajuste adequado às posições que o modelo reporta.
Biblioteca para um «Contexto» X3D.
O «contexto»
X3Dtem informação sobre quais são os elementos a atualizar (oleadere ofollower) e métodos para atualizar os respetivos atributos.
Para esta animação particular as identificações do leader e do follower, agrupados num único objeto, ficam:
const objects_x3d = {
leader: "x3d:leader",
follower: "x3d:follower"
};
Este objeto tem a informação necessária para construir e atualizar um «contexto» X3D. Toda essa funcionalidade deve ficar agrupada numa biblioteca (render_x3d.js):
export { new_context_x3d };
function render_x3d(m) {
const leader_x = (m.leader.pos.x / m.width - 0.5) * 5;
const leader_y = (m.leader.pos.y / m.height - 0.5) * 5;
this.leader.setAttribute("translation", `${leader_x} ${leader_y} 0.0`);
const follower_x = (m.follower.pos.x / m.width - 0.5) * 5;
const follower_y = (m.follower.pos.y / m.height - 0.5) * 5;
this.follower.setAttribute("translation", `${follower_x} ${follower_y} 0.0`);
}
function new_context_x3d(objects_x3d) {
return {
leader: document.getElementById(objects_x3d.leader),
follower: document.getElementById(objects_x3d.follower),
render: render_x3d,
};
}
Esta biblioteca exporta apenas a função new_context_x3d:
- O argumento
objects_x3dtem a estrutura já ilustrada, com osiddos elementos a animar. - O objeto devolvido tem:
- Os elementos
leaderefolloweridentificados. - O método
render, que é executado pela funçãorender_x3d.
- Os elementos
- A função
render_x3d:- Tem argumento
m, um modelo («compatível»). - Usa as posições do
leadere dofollowerdo modelo (m.leader.posem.follower.pos) para atualizar as posições (os atributos"translation") doleadere dofollowerdo contexto (this).
- Tem argumento
- Nesta atualização as coordenadas «do modelo» são convertidas para coordenadas típicas em sistemas 3D:
- Os valores
xdo modelo variam entre0em.widthe são convertidos para valores entre-2.5e2.5. - Analogamente, os valores
ydo modelo, que variam entre0emodel.height, são convertidos para valores entre-2.5e2.5.
- Os valores
Visualização 3JS
O sistema
3JSé semelhante ao sistemaX3DeSVGporque os objetos gráficos são «pré-construídos» mas, como oC2D, o modelo gráfico é definido por instruções e estruturas de dados.
O esquema usado para os outros sistemas gráficos é o seguinte:
- Define-se uma biblioteca
render_XYZ.js. - Essa biblioteca exporta uma função
new_context_XYZque:- Tem como argumentos a informação necessária inicialização do «contexto», como a identificação dos elementos
domou o próprio modelo. - Devolve um objeto, um «contexto», com um método
renderadequado à visualização do modelo.
- Tem como argumentos a informação necessária inicialização do «contexto», como a identificação dos elementos
Com base nos modelos disponíveis, a biblioteca render_3js.js fica:
import * as THREE from "three";
import { OrbitControls } from "three/addons/controls/OrbitControls.js";
export { new_context_3js };
function new_context_3js(container_id, model) {
// New Context for 3JS
}
Esta biblioteca exporta apenas a função new_context_3js, detalhada mais abaixo.
- O argumento
container_idé o identificador de um elemento (no documento) onde esta visualização vai ser construída. - O argumento
modelserve para dimensionar esse elemento.
Um «Contexto» para 3JS
A inicialização do «contexto» para o sistema 3JS segue os passos que estão descritos, por exemplo, aqui:
function new_context_3js(container_id, model) {
const container = document.getElementById(container_id);
container.width = model.width;
container.height = model.height;
const renderer = new THREE.WebGLRenderer({ alpha: true });
renderer.setPixelRatio(window.devicePixelRatio);
renderer.setSize(container.width, container.height);
renderer.setClearColor("#FAFAEB", 1.0);
container.appendChild(renderer.domElement);
const camera = new THREE.PerspectiveCamera(
35, // abertura
container.width / container.height, // proporção largura/altura
0.1, // corte perto
10000, // corte longe
);
camera.position.set(-2.5, 0, 20);
const controls = new OrbitControls(camera, renderer.domElement);
const scene = new THREE.Scene();
camera.lookAt(scene.position);
const light = new THREE.AmbientLight("white");
light.intensity = 2.0;
scene.add(light);
// Further instructions
}
Neste fragmento está definido:
- Uma referência para o elemento
HTMLque vai receber a visualização:container. - Um objeto para construir a visualização da cena:
renderer. - Uma câmara para definir a visualização da cena:
camera. - Um objeto para controlar a câmara:
controls. - Uma cena para conter os objetos gráficos:
scene. - Iluminação para iluminar a cena:
light.
Falta adicionar objetos gráficos para o leader e para o follower:
function new_context_3js(container_id, model) {
const container = ...;
const renderer = ...;
const camera = ...;
const controls = ...;
const scene = ...;
const light = ...;
//
// LEADER
const leader_geo = new THREE.BoxGeometry(0.6, 0.6, 0.6);
const leader_mat = new THREE.MeshLambertMaterial({
color: model.leader.color,
});
const leader = new THREE.Mesh(leader_geo, leader_mat);
scene.add(leader);
// FOLLOWER
const follower_geo = new THREE.BoxGeometry(0.2, 0.2, 0.2);
const follower_mat = new THREE.MeshLambertMaterial({
color: model.follower.color,
});
const follower = new THREE.Mesh(follower_geo, follower_mat);
scene.add(follower);
// Further instructions
}
Todos os elementos da visualização estão definidos. Falta definir o método de atualização (render) e devolver o «contexto»:
function new_context_3js(container_id, model) {
const container = ...;
const renderer = ...;
const camera = ...;
const controls = ...;
const scene = ...;
const light = ...;
//
// LEADER
const leader = ...;
// FOLLOWER
const follower = ...;
//
// RENDER
function render(m) {
controls.update(); // Atualizar os controlos
const leader_x = (m.leader.pos.x / m.width - 0.5) * 5;
const leader_y = (m.leader.pos.y / m.height - 0.5) * 5;
leader.position.set(leader_x, leader_y, 0);
const follower_x = (m.follower.pos.x / m.width - 0.5) * 5;
const follower_y = (m.follower.pos.y / m.height - 0.5) * 5;
follower.position.set(follower_x, follower_y, 0);
renderer.render(scene, camera); // Construir a cena atualizada
}
return {
render: render,
};
}
- O objeto devolvido é
{render: render}que usa a funçãorenderpara atualizar as posições doleadere dofollowere a visualização da cena. - Tal como na visualização do
X3D, as coordenadas do modelo são convertidas (da mesma forma) para um referencial mais típico em sistemas3D.
Este exemplo funciona porque a função
function render(m) { ... }«capta» todo o contexto em que é definida.Isto é,
render(m)mantém «vivos» os objetos no contexto em que é definida e que refere diretamente e também os objetos que refere indiretamente. Por exemplo:
- Referências diretas do contexto:
controls,leader,follower,renderer,scene,camera.- Referências indiretas:
container,light, e os vários objetos auxiliares (e.g.leader_geo).
O Ciclo de Animação
O ciclo de animação inclui a atualização seguida da visualização do modelo nos quatro sistemas gráficos e é definido pela função
step. Este nível mais elevado da animação pode ficar na sua própria biblioteca, onde são compostos e arranjados (quase) todos os elementos principais.
- São importadas as bibliotecas de adaptação aos sistemas gráficos e também a biblioteca do modelo.
- Os argumentos da função
main()identificam os elementoshtmlcontrolados pela animação. - O modelo, e os «contextos» são inicializados.
- É definido o passo do ciclo de animação.
- É ativado o ciclo de animação.
Conteúdo do ficheiro grsystems.js:
import { new_context_c2d } from "render_c2d";
import { new_context_svg } from "render_svg";
import { new_context_3js } from "render_3js";
import { new_context_x3d } from "render_x3d";
import { init_model } from "model";
export { main as default };
function main(
target_c2d,
target_3js,
target_terminal,
objects_svg,
objects_x3d,
) {
const terminal = document.getElementById(target_terminal);
const write = (text) => {
terminal.innerText = text;
};
const model = init_model();
const context_c2d = new_context_c2d(target_c2d, model);
const context_svg = new_context_svg(objects_svg);
const context_x3d = new_context_x3d(objects_x3d);
const context_3js = new_context_3js(target_3js, model);
const step = function (ts) {
model.update(ts);
write(`AGE: ${model.age}`);
context_c2d.render(model);
context_svg.render(model);
context_x3d.render(model);
context_3js.render(model);
requestAnimationFrame(step);
};
requestAnimationFrame(step);
}
terminalé o elementohtmlque vai ser a «consola», onde é mostrada informação textual; A funçãowritepermite escrever para essa «consola».modelé inicializado pela funçãoinit_model.- São criados quatro contextos, um para cada sistema:
context_c2d,context_svg,context_x3d,context_3js. - A função
stepdefine o passo no ciclo de animação: - O modelo é atualizado;
- É mostrada a idade do modelo na consola;
- O modelo é simultaneamente visualizado nos quatro «contextos».
- É colocado um pedido para o browser executar
stepna próxima atualização desta página. - É colocado o primeiro pedido para o browser executar
stepna próxima atualização desta página.
A Parte HTML
A animação existe num documento
HTMLque tem de incorporar os vários containers para as visualizações, assim como definir as importações necessárias.
Suporte para o X3D:
<script
type="application/javascript"
src="./lib/x3dom/x3dom-full.js"
></script>
<link
rel="stylesheet"
type="text/css"
href="./lib/x3dom/x3dom.css"
/>
Importação de bibliotecas JavaScript. Inclui:
- tweens com o
tween.js. 3JSe respetivos addons (para o controlo orbital da câmara).- As bibliotecas descritas aqui: o modelo (
model), os «contextos» (render_XYZ) e o controlo da animação (grsystems).
<script type="importmap">
{
"imports": {
"tween": "./lib/tweenjs/tween.esm.js",
"three": "./lib/threejs/build/three.module.js",
"three/addons/": "./lib/threejs/addons/jsm/",
"grsystems": "./grsystems.js",
"model": "./model_grsystems.js",
"render_c2d": "./render_c2d.js",
"render_svg": "./render_svg.js",
"render_3js": "./render_3js.js",
"render_x3d": "./render_x3d.js"
}
}
</script>
Grelha com as visualizações:
<div style="display:grid;grid-template-columns:256px 256px;margin:0 auto;width: fit-content">
<div id="terminal" style="font-family: monospace;padding:0.5em;background:black;color:seagreen;grid-column:1/ span 2">TERMINAL</div>
<canvas id="c2d:canvas"></canvas>
<div id="3js:container"></div>
<X3D width="256px" height="256px">
...
</X3D>
<svg id="svg:container" width="256px" height="256px">
...
</svg>
</div>
Ativação da animação:
<script type="module">
import main from "grsystems";
const objects_svg = {
leader: "svg:leader",
follower: "svg:follower"
};
const objects_x3d = {
leader: "x3d:leader",
follower: "x3d:follower"
};
main("c2d:canvas", "3js:container", "terminal", objects_svg, objects_x3d);
</script>
O Que Falta (Exercícios)
| Uma Imagem Estereoscópica |
|---|
 |
- Torne a animação mais sofisticada, seguindo estas sugestões.
- Esta animação não tem eventos externos. Procure na documentação adequada como controlar o movimento do
leaderusando o rato. - Adicione a possibilidade de pausar a animação: em modo de pausa o modelo apenas atualiza um conjunto reduzido de parâmetros (e.g.
ageelast_ts). - Considere uma variante deste exercício em que, em vez de quarto sistemas gráficos, usa duas visualizações
3JSdo mesmo modelo que diferem apenas ligeiramente na posição da câmara. Isto é, faça uma visualização estereoscópica da animação.
Referenciais e Hierarquias
Um modelo hierárquico com estados.
Este exemplo ilustra uma animação com várias caraterísticas:
- O modelo é uma hierarquia de objetos e sub-objetos, suportada por transformações entre os espaços (referenciais) adequados.
- O modelo tem estados que controlam as «fases» da animação.
- Implementa um «mini sistema gráfico» declarativo (como o
SVGou oX3D) sobre oC2D.
Hierarquias de Objetos gráficos
A cena deve organizar os objetos gráficos num grafo que representa a estrutura do modelo.
Neste exemplo temos o seguinte grafo — os nós retangulares representam formas e os nós ovais representam «grupos».
--- config: theme: neutral --- graph TD; model([model]) ==> truck([truck]) model -.-> bin truck ==> bin([bin]) truck ==> chassis truck ==> cabin truck ==> glass truck ==> wheel1 truck ==> wheel2 truck ==> wheel3 bin ==> box model ===> floor model ===> background
Cada grupo define um «espaço» que organiza os seus descendentes. Para tal, no âmbito deste exemplo, definimos um objeto gráfico como um objeto javascript com os seguintes atributos:
{
tr: {x: ..., y: ..., alpha: ..., sx: ..., sy: ...},
shape: ...,
style: { fill: ..., stroke: ..., lineWidth: ... },
children: [ ... ]
}
em que:
trdefine uma transformação que se aplica a esse objeto e a todos os seus descendentes (children).shapedefine a geometria do objeto.styledefine as propriedades visuais do objeto.childrendefine os descendentes (sub-objetos subordinados) que herdam a transformação.
Além disso:
- Cada atributo e sub-atributo é opcional.
- As arestas sólidas representam descendentes. Por exemplo,
glassé descendente detruck, que é descendente demodel. - Há uma aresta pontilhada, de
modelparabin, que representa uma referência. Isto é,binnão é sub-elemento demodelmas é referido por um atributo:model.bin.
Esta convenção equilibra «capacidade expressiva» com «simplicidade».
Por exemplo, o objeto («grupo») bin fica definido por:
{
tr: { x: -0.85, y: -0.7, alpha: 0 * Math.PI },
children: [
{
tr: { x: 0.5, y: 0.5, sx: 0.5, sy: 0.5 },
shape: "M 0 0 m 1 0.5 l -1.5 0 l -0.5 -0.5 l 0 -0.5 l 2 0 l 0 1 Z",
style: {
fill: "maroon",
stroke: "firebrick",
lineWidth: 0.2,
},
},
],
}
Este objeto não tem nem forma (shape) nem propriedades visuais (style). No entanto, define uma transformação (tr: { x: -0.85, y: -0.7, alpha: 0 * Math.PI }) e tem um descendente (box no diagrama acima). Neste descendente:
- A forma (
shape) é definida por um caminho que usa a sintaxe dos caminhosSVG(o atributoddos elementospath) - As propriedades visuais (
style) definem como é pintado e traçado. - A transformação (
tr) posiciona-o (x: ..., y: ...) e dimensiona-o (sx: ..., sy: ...) no referencial do seu parente.
Um Sistema Gráfico Dedicado
A visualização de cenas (e modelos) com aquele tipo de objetos gráficos assenta numa extensão do sistema
C2Dcom métodos e funções adequadas.
Transformação
Definir o espaço/referencial do objeto gráfico no objeto «parente».
A transformação, se definida, aplica-se logo no início da visualização porque afeta as instruções de desenho e, também, os descendentes.
/**
A Graphical Object is an object with attributes:
- `tr`: a transformation: `x,y` translation; `alpha` rotation; `sx,sy` scale;
- `children`: sub-objects;
- `shape`: A "path" program;
- `style`: visual properties: `stroke`; `fill`; `lineWidth`;
*/
function render(grobj) {
if (grobj.tr) {
const x = grobj.tr.x || 0.0;
const y = grobj.tr.y || 0.0;
const alpha = grobj.tr.alpha || 0.0;
const sx = grobj.tr.sx || 1.0;
const sy = grobj.tr.sy || 1.0;
this.save();
this.translate(x, y);
this.rotate(alpha);
this.scale(sx, sy);
}
// Further instructions
if (grobj.tr) this.restore();
}
A última instrução
if (grobj.tr) this.restore();
garante que os efeitos da (eventual) transformação aplicada no início são repostos no estado anterior.
Descendentes
Aplicar recursivamente a visualização aos descendentes.
A visualização dos descendentes (se definidos) usa exatamente a mesma função de visualização:
function render(grobj) {
if (grobj.tr) { ... }
if (grobj.children)
grobj.children.forEach((child) => this.render(child));
// Further instructions
if (grobj.tr) this.restore();
}
Aqui está-se a utilizar o método Array.forEach porque o código fica mais legível.
Visualização
Usar o sistema
C2Dpara visualizar o objeto gráfico.
Se o objeto gráfico tiver definidas uma forma e propriedades visuais, é necessário:
- Definir a forma no sistema
C2D. - Aplicar as propriedades visuais que estejam definidas; «traçar» o contorno; «pintar» o interior.
function render(grobj) {
if (grobj.tr) { ... }
if (grobj.children) { ... }
if (grobj.shape && grobj.style) {
const shape = new Path2D(grobj.shape); // Geometry
if (grobj.style.stroke) { // Stroke?
const prev_lineWidth = this.lineWidth;
this.lineWidth = grobj.style.lineWidth || this.lineWidth;
this.strokeStyle = grobj.style.stroke;
this.stroke(shape);
this.lineWidth = prev_lineWidth;
}
if (grobj.style.fill) { // Fill?
this.fillStyle = grobj.style.fill;
this.fill(shape);
}
}
if (grobj.tr) this.restore();
}
As instruções
const prev_lineWidth = this.lineWidth;
...
this.lineWidth = prev_lineWidth;
são necessárias porque a propriedade C2D.lineWidth não fica registada com o método .save(). Desta forma (1) guardam o valor prévio desse atributo e depois (2) repõem o valor guardado.
Objetos Primitivos
Funções de suporte para algumas formas e transformações simples.
Um quadrado centrado na origem e de lado 2:
function urect() {
return "M 0 0 m -1 -1 l 2 0 l 0 2 l -2 0 l 0 -2 Z";
}
Um círculo centrado na origem e de raio 1:
function ucirc() {
return "M 0 0 m 1 0 a 1 1 0 1 0 -2 0 a 1 1 0 1 0 2 0";
}
A transformação identidade:
function tid() {
return { x: 0.0, y: 0.0, sx: 1.0, sy: 1.0, alpha: 0.0 };
}
Inicialização
Criar um contexto gráfico adequado.
A inicialização do contexto adiciona o método render (explicado acima) a um CanvasRenderingContext2D. Adicionalmente, ajusta a dimensão do canvas respetivo e ajusta o referencial com:
| Orientação «Matemática» |
|---|
 |
de forma que
| Canto | Coordenadas |
|---|---|
| Superior Esquerdo | $(-1, +1)$ |
| Inferior Esquerdo | $(-1, -1)$ |
| Superior Direito | $(+1, +1)$ |
| Inferior Direito | $(+1, -1)$ |
Adicionalmente, a inicialização do contexto gráfico também acrescenta o método print para mostrar mensagens de texto num elemento indicado.
function new_context(container_id, terminal_id, width, height) {
const context = document.getElementById(container_id).getContext("2d");
const terminal = document.getElementById(terminal_id);
context.print = (text) => (terminal.innerHTML = text);
context.render = render;
context.canvas.width = width;
context.canvas.height = height;
context.save();
context.lineWidth = 1.0 / Math.max(context.canvas.width, context.canvas.height, 1);
context.translate(0.5 * context.canvas.width, 0.5 * context.canvas.height);
context.scale(0.5 * context.canvas.width, -0.5 * context.canvas.height);
return context;
}
A instrução
context.lineWidth = 1.0 / Math.max(context.canvas.width, context.canvas.height, 1);
ajusta a espessura do traço a 1% da maior dimensão da tela.
As duas instruções
context.translate(0.5 * context.canvas.width, 0.5 * context.canvas.height);
context.scale(0.5 * context.canvas.width, -0.5 * context.canvas.height);
ativam a orientação «Matemática» do referencial e definem as coordenadas dos cantos como mostrado acima.
A Biblioteca Gráfica
Toda a funcionalidade do contexto gráfico fica agrupada numa biblioteca (
minigrsys.js)
export { urect, ucirc, tid, new_context };
function urect() { ... }
function ucirc() { ... }
function tid() { ... }
function new_context(container_id, terminal_id, width, height) { ... }
function render(grobj) { ... }
Modelo
O modelo deve conter informação sobre o grafo de cena, a «fase» da animação, o estado de «pausa» e um método para a atualização.
- O grafo de cena tem os elementos gráficos, cada um com transformações; forma; propriedades visuais; descendentes.
- As «fases» da animação são: andar para a direita; «descarregar» a carga; voltar à «base».
- Se a animação está em «pausa» os atributos não são atualizados.
- O método
updatefaz a atualização passo-a-passo do modelo. - É ainda necessário integrar informação «temporal»: o ciclo (
age); e o carimbo temporal da atualização anterior (last_ts).
Representação da informação «temporal» e das fases da animação:
function init_model() {
const model = {
age: 0,
paused: false,
phase: 0,
phase_age: 0,
};
// Further instructions
model.last_ts = performance.now();
return model;
}
O atributo age é o contador de ciclos de animação que o modelo «viveu» e paused controla se o modelo está, ou não em modo «pausa».
Mais à frente, na explicação do método update, vai ser mostrado como a «pausa» afeta a evolução do modelo mas por enquanto interessa associar-lhe um evento de teclado:
function init_model() {
const model = { ... };
document.addEventListener("keydown", (e) => {
if (e.key === "p") {
model.paused = !model.paused;
}
});
// Further instructions
model.last_ts = performance.now();
return model;
}
Desta forma cada vez que é premida a tecla p o valor Booleano de model.paused é invertido: o modelo passa de paused para running e vice-versa.
Descendentes
Além de definir os descendentes de um modelo é também conveniente identificar alguns desses descendentes com «acesso direto».
function init_model() {
const model = { ... };
document.addEventListener("keydown", ... );
model.add_child = add_child;
// Further instructions
model.last_ts = performance.now();
return model;
}
function add_child(name, grobj) {
if (!this.children) this.children = [];
this.children.push(grobj);
this[name] = grobj;
}
O método add_child pode ser adicionado a qualquer objeto gráfico; acrescenta um descendente (grobj) a esse objeto e identifica-o pelo atributo name.
- Sem este método continuaria a ser possível aceder a cada descendente, pelo seu índice na lista/atributo
.children— uma forma pouco ágil.
O fundo (background) e o chão (floor) são colocados no modelo desta forma:
function init_model() {
const model = { ... };
document.addEventListener("keydown", ... );
model.add_child = add_child;
model.add_child("background", {
shape: urect(),
tr: { x: 0.0, y: 0.0, sx: 1.0, sy: 1.0, },
style: { fill: "lightskyblue" },
});
model.add_child("floor", {
shape: urect(),
tr: { x: 0.0, y: -0.9, sx: 1.0, sy: 0.1, },
style: { fill: "slategray" },
});
model.last_ts = performance.now();
return model;
}
Desta forma o modelo passou a ter mais dois atributos: background e floor que referem diretamente o fundo e o chão respetivamente.
Note-se que o fundo é um retângulo unitário centrado ({x: 0.0, y: 0.0}) e dimensionado ({sx: 1.0, sy: 1.0}) de forma a cobrir toda a área da tela — neste caso esta transformação não é necessária porque coincide com a posição e dimensão de urect.
A inicialização do modelo ainda não está completa: falta adicionar o camião e o método de atualização.
Camião
Este é o «ator» principal da animação: desloca-se para a esquerda e para a direita e tem vários descendentes. Desses, o contentor também tem a sua animação, rodando quando o camião para.
Dada a (relativa) complexidade do camião, assim como do contentor, estes objetos gráficos são definidos em funções dedicadas.
O contentor fica definido em:
function bin() {
return {
tr: { x: -0.85, y: -0.5, alpha: 0 * Math.PI },
children: [
{ // The rotation axis
tr: { sx: 0.05, sy: 0.05 },
shape: ucirc(),
style: { fill: "black" } },
{ // The bin "sub-object"
tr: { x: 0.5, y: 0.3, sx: 0.5, sy: 0.5 },
shape: "M 0 0 m 1 0.5 l -1.5 0 l -0.5 -0.5 l 0 -0.5 l 2 0 l 0 1 Z",
style: {
fill: "maroon",
stroke: "firebrick",
lineWidth: 0.2,
},
},
],
};
}
O aspeto mais interessante deste objeto gráfico tem a ver com a forma como é rodado: Não em torno do centro da geometria, mas do eixo assinalado pelo (semi) ponto preto.
Para se obter esta rotação «fora do centro» é preciso «re-centrar» o objeto gráfico para o eixo pretendido; e, além de ajustar o tamanho, é precisamente esse o papel da transformação «local»:
function bin() {
return {
...
{ // The bin "sub-object"
tr: { x: 0.5, y: 0.3, sx: 0.5, sy: 0.5 },
...
},
...
};
}
O camião tem o contentor, e outro objetos, como descendentes:
function truck() {
const truck_obj = {
tr: tid(),
children: [
{ // Chassis
shape: urect(),
tr: { x: -0.05, y: -0.6, sx: 0.8, sy: 0.05 },
style: { fill: "darkolivegreen" },
},
{ // Cabin
shape: "M 0 0 l 1 0 l 0 -1 l -2 0 l 0 2 l 1 0 l 0 -1 Z",
style: { fill: "darkgreen" },
tr: { x: 0.5, y: -0.3, sx: 0.25, sy: 0.25 },
},
{ // Glass
shape: "M 0 0 l 1 0 a 1 1 0 0 1 -1 1 l 0 -1 Z",
style: { fill: "lightcyan" },
tr: { x: 0.5, y: -0.3, sx: 0.25, sy: 0.25 },
},
wheel(-0.65, -0.7), // 3 Wheels
wheel(-0.35, -0.7), // each defined by the
wheel(0.5, -0.7), // same function...
],
};
// The bin
truck_obj.add_child = add_child;
truck_obj.add_child("bin", bin());
return truck_obj;
}
As rodas fazem parte do camião. Como objeto gráfico, são simples, mas são três. Para não repetir código, definem-se numa função:
function wheel(x, y) {
return {
shape: ucirc(),
tr: { x: x, y: y, sx: 0.05, sy: 0.05 },
style: {
fill: "gray",
stroke: "black",
lineWidth: 2.0,
},
};
}
A inicialização do modelo fica completa com o camião e com uma referência ao contentor:
function init_model() {
const model = { ... };
document.addEventListener("keydown", ... );
model.add_child = add_child;
model.add_child("background", ... );
model.add_child("floor", ... );
model.add_child("truck", truck());
// Adjust the position
model.truck.tr = { x: -0.8, y: -0.4, sx: 0.25, sy: 0.5 };
// Get a reference to the bin.
model["bin"] = model.truck.bin;
model.update = update;
model.last_ts = performance.now();
return model;
}
e falta apenas definir a atualização — o método update.
Atualização
Esta animação tem fases distintas, onde acontece o movimento do camião e do contentor.
O movimento do camião segue uma sequência fixa de fases:
- Vira-se para a «direita» e desloca-se «em frente».
- Levanta o contentor.
- Baixa o contentor.
- Vira-se para a «esquerda» e desloca-se «em frente».
Além disso, cada fase dura exatamente um certo número de ciclos.
A atualização começa pelo tempo decorrido deste a atualização mais recente:
function update(ts) {
const dt = 0.001 * (ts - this.last_ts);
this.last_ts = ts;
// Further instructions
}
Antes de se atualizar a contagem de ciclos (age) e outros atributos, é necessário tratar das pausas.
Pausas
Quando o modelo está em «pausa» os seus atributos não mudam.
Portanto, em modo «pausa», a atualização fica completa após ser processado this.last_ts:
function update(ts) {
const dt = ts - this.last_ts;
const last_ts = ts;
if (this.paused) return;
// Further instructions
}
A instrução
if (this.paused) return;
impede que, quando this.paused é true, sejam atualizados os restantes atributos do modelo.
Caso contrário, se this.paused for false, o método update continua com a contagem de ciclos. Neste caso também importa contar os ciclos na fase atual:
function update(ts) {
// Previous instructions
this.age += 1;
this.phase_age += 1;
// Further instructions
}
Fases
Em cada fase o modelo faz uma única animação.
Os atributos model.phase e model.phase_age controlam qual é a animação «ativa» e quantos ciclos decorreram nessa fase.
As fases controlam a animação «ativa» de acordo com a seguinte tabela:
| Animação | Fase | Duração (ciclos) | Fase seguinte |
|---|---|---|---|
| camião para a direita | 0 | 150 | 1 |
| levantar contentor | 1 | 50 | 2 |
| baixar contentor | 2 | 50 | 3 |
| camião para a esquerda | 3 | 150 | 0 |
function update(ts) {
// Previous instructions
if (this.phase === 0 && this.phase_age >= 150) {
this.phase = 1;
this.phase_age = 0;
} else if (this.phase === 1 && this.phase_age >= 50) {
this.phase = 2;
this.phase_age = 0;
} else if (this.phase === 2 && this.phase_age >= 50) {
this.phase = 3;
this.phase_age = 0;
this.truck.tr.sx *= -1;
} else if (this.phase === 3 && this.phase_age >= 150) {
this.phase = 0;
this.phase_age = 0;
this.truck.tr.sx *= -1;
}
// Further instructions
}
Estas instruções verificam se a fase «ativa» expirou; nesse caso é «ativada» a fase seguinte.
Após a determinação da fase «ativa» são aplicadas as respetivas transformações
function update(ts) {
// Previous instructions
if (this.phase === 0) this.truck.tr.x += 0.01;
if (this.phase === 1) this.bin.tr.alpha += 0.01 * Math.PI;
if (this.phase === 2) this.bin.tr.alpha -= 0.01 * Math.PI;
if (this.phase === 3) this.truck.tr.x -= 0.01;
}
e o modelo fica atualizado.
A Biblioteca do Modelo
A biblioteca do modelo junta as funções auxiliares, a inicialização e a atualização do modelo no ficheiro
truck_model.js.
import { urect, ucirc, tid } from "minigrsys";
export { init_model };
function wheel(x, y) { ... }
function bin() { ... }
function truck() { ... }
function add_child(name, grobj) { ... }
function init_model() { ... }
function update(ts) { ... }
Esta biblioteca importa algumas funções do sistema gráfico, para facilitar a definição das formas e transformações dos objetos gráficos definidos aqui.
A única função exportada é init_model, que devolve um objeto que descreve o grafo de cena e com os atributos e métodos adequados à animação.
O HTML e o Ciclo de Animação
Esta animação existe num documento
HTMLcom certos elementos presentes. O controlo da animação é definido numa função própria (main).
O mapa de importação define as referências para as bibliotecas:
<script type="importmap">
{
"imports": {
"minigrsys": "./minigrsys.js",
"model": "./truck_model.js",
"main": "./refs_main.js"
}
}
</script>
A visualização decorre num elemento <canvas> e as mensagens de texto num <div>. Estes dois elementos são alinhados numa coluna:
<div style="
display:grid;
grid-template-columns:512px;
margin:0 auto;
width: fit-content">
<div id="refs:terminal" style="
font-family: monospace;
padding:0.5em;
background:black;
color:seagreen">TERMINAL</div>
<canvas id="refs:canvas"></canvas>
</div>
A animação inicia-se com a função main que tem como argumentos os id relevantes e o tamanho da visualização:
<script type="module">
import { main } from "main";
main("refs:canvas", "refs:terminal",
512, 256);
</script>
O controlo da animação está definido na biblioteca refs_main.js, que importa (as bibliotecas para) o sistema gráfico e o modelo e exporta a função main, com:
- A inicialização do modelo e do contexto (sistema) gráfico.
- A definição do passo da animação (
step). - O início do ciclo de animação.
import { new_context } from "minigrsys";
import { init_model } from "model";
export { main };
function main(container_id, terminal_id, width, height) {
const model = init_model();
const context = new_context(container_id, terminal_id, width, height);
function step(ts) {
model.update(ts);
context.render(model);
context.print(
`AGE: ${model.age} PHASE: ${model.phase} ${model.paused ? "PAUSED" : "RUNNING"}`,
);
requestAnimationFrame(step);
}
requestAnimationFrame(step);
}
Exercícios
- As durações e sequências das fases da animação estão diretamente definidas na função
updatedo modelo — isso é má prática. Melhore o modelo de forma a incluir as fases, as respetivas durações e a fase seguinte. Isto é:- Descreva cada fase com um objeto, por exemplo:
{ id: int, // The Id of this phase duration: int, // The target duration (in cycles) age: int, // If active, the current duration next: int, // The next phase action: (object) => { ... } // A function to execute // at each update, when this phase is active start: (object) => { ... } // A function to execute // when this phase becomes active }- Integre a gestão de uma lista de fases no método
updatedo modelo. - Acrescente a definição das fases na inicialização do modelo.
- Em vez das durações das animações serem controladas pelo número de ciclos, defina-as de forma a serem controladas, por exemplo, por uma posição «alvo» ou um ângulo «alvo».