Seguinte: Dois casos conhecidos Anterior: Área da superfície esférica
Na dimensăo 0 a medida usual é a de contagem. Na dimensăo 1 temos a noçăo de comprimento de uma curva no espaço como a do limite da soma do comprimento de linhas poligonais inscritas.
Mas como contamos a área de uma superfície, se nem sequer localmente a podemos planificar4? Que conceito afinal de volume é esse na dimensăo 2 ou em dimensőes superiores?
A resposta é hoje facilmente ultrapassada por meio da teoria da `métrica em variedades diferenciáveis' ou geometria riemanniana. Seja na geometria diferencial ou na física teórica, um tal instrumento năo passa de uma idealizaçăo.
Abstraímos da realidade dos objectos físicos, com rigor matemático, um espaço vectorial tangente onde fazemos a geometria clássica e daí partimos para o estudo de fenómenos intrínsecos ou invariantes e, sob uma perspectiva nova, de propriedades globais5 dos espaços, seus subespaços e do movimento entre estes.
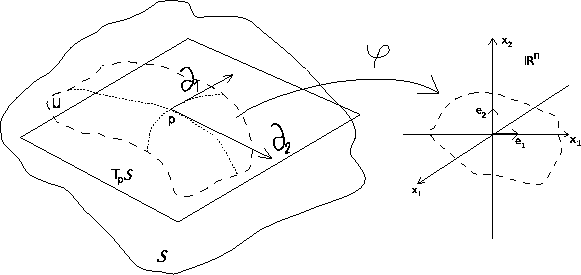
Suponhamos entăo que é dada uma porçăo de superfície ![]() ou uma variedade de dimensăo
ou uma variedade de dimensăo ![]() (conceito mais geral, mas a mesma ideia que em dim 2) como na figura 7.
(conceito mais geral, mas a mesma ideia que em dim 2) como na figura 7.
 |
Agora supomos que é dada a métrica, o instrumento matemático
![]() que nos permite calcular ângulos,
que nos permite calcular ângulos,
A métrica fica bem determinada numa carta local pelos valores
![]() ,
,
![]() . Recordemos que vectores
. Recordemos que vectores
![]() , de classe
, de classe
![]() por natureza, săo induzidos em
por natureza, săo induzidos em ![]() pela própria carta
pela própria carta ![]() . Săo campos vectoriais locais. Havendo necessidade, podę-mo-los denotar por
. Săo campos vectoriais locais. Havendo necessidade, podę-mo-los denotar por
![]() .
.
Seja
![]() , onde cada
, onde cada ![]() é funçăo de
é funçăo de ![]() . É fácil adivinhar que as cartas resultam em funçőes
. É fácil adivinhar que as cartas resultam em funçőes
![]() sobre as variedades, por construçăo, e que verificarăo
sobre as variedades, por construçăo, e que verificarăo
 |
(6) |
Suponhamos agora que nos é dada outra carta qualquer ![]() com domínio (outro
com domínio (outro ![]() ) passando pelo domínio
) passando pelo domínio ![]() de
de ![]() . Escrevamos
. Escrevamos
![]() . Entăo temos uma `lei de transformaçăo natural' entre cartas na intersecçăo dos domínios
. Entăo temos uma `lei de transformaçăo natural' entre cartas na intersecçăo dos domínios
Podemos escrever (8) em termos matriciais: se ![]() é a matriz da métrica, ou seja, se
é a matriz da métrica, ou seja, se
![]() e
e ![]() é a matriz jacobiana
é a matriz jacobiana
![]() , entăo aquela equaçăo escreve-se
, entăo aquela equaçăo escreve-se
E temos finalmente em qualquer dimensăo a definiçăo
Eis essencialmente como se chega hoje ao volume sabendo apenas o integral de Riemann, o qual é bem conhecido da Análise. (A história mostrará inclusive que este é que foi feito para aquele e năo o contrário, como agora parece estarmos a pretender).
Note-se que a `forma diferencial'
![]() , de grau igual ŕ dimensăo de
, de grau igual ŕ dimensăo de ![]() ,
,
 e comprimentos
e comprimentos