Function prototypes. More...
#include "dcldef.h" Include dependency graph for dcl.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for dcl.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| CTYPE void DLL | _DC_Open (int Platform, int Sensor, int PortAddress, int InterfaceModel, int StartMode, int Camera, int TaskSettings) |
| Open the camera. The same procedure as DC_Open, but without the last two parameters (functional pointers). Such procedure became necessary because of the use of the library with LabView as it does not allow one to use this kind of parameters. More... | |
| CTYPE int DLL | _DC_OpenByFile (char *ConfigFile, int StartMode) |
| Open the camera. The same procedure as DC_OpenByFile, but without the last two parameters (functional pointers). Such procedure became necessary because of the use of the library with LabView as it does not allow one to use this kind of parameters. More... | |
| CTYPE void DLL | DC_AGetCCD (int Mode, double *Exposure, U16 *mat[8], int camera) |
| CTYPE void DLL | DC_ArmAcquisition (double Exposure, int Camera) |
| Arm the camera acquisition. More... | |
| CTYPE void DLL | DC_ArmTimerHandle (int Mode, int camera) |
| CTYPE U32 DLL | DC_BckBusy (int Camera) |
| Return the CPU time (ms) used by background activity. More... | |
| CTYPE U32 DLL | DC_BckGnd (int Camera) |
| Return a background operation counter. Counter variable, which is increased at each background process action, this process is activated each time the camera is initialized with at least one of the CCDHANDLE or TEMPHANDLE options. More... | |
| CTYPE void DLL | DC_BrkFlg (int camera) |
| CTYPE void DLL | DC_CalibFW (int Camera) |
| It carries out the calibration of the filter wheel by placing it on the first filter. More... | |
| CTYPE int DLL | DC_CamQuery (int *CameraList) |
| Return the list and the numbver of the camera handled by the library. More... | |
| CTYPE int DLL | DC_CCDQuery (int SelectedCamera, int *CCDList) |
| Return the list (CCD code definitions) and the number of the CCD being used by selected camera. More... | |
| CTYPE const char DLL_P | DC_CCDtoName (int CCDCode, int camera) |
| CTYPE void DLL | DC_CCDtoNameVB (int CCDCode, char *CCDName, int camera) |
| CTYPE int DLL | DC_CheckTempEquil (int hist, F64 tolerance, int camera) |
| CTYPE void DLL | DC_ClearCCD (int camera) |
| CTYPE void DLL | DC_Close (int Camera) |
| Shuts down the control operations of the camera. Procedure that shuts down the control operations of the camera. It is always important to carry out this procedure at the end of the application you are writing, as the resources required by the operative system must be not be in use. As a matter of fact, if this procedure is not carried out and you attempt another work session at a later date you will receive a message that an error has occurred. More... | |
| CTYPE void DLL | DC_Cooler (int Mode, int Camera) |
| Procedure that allows you to control the cooler manually. Procedure that allows you to control the cooler manually. In the parameter Mode if you insert 1 the cooler is turned on, if you insert 0 it is turned off. More... | |
| CTYPE int DLL | DC_CoolerStatus (int Camera) |
| Procedure that reports the activity status of the cooler. More... | |
| CTYPE void DLL | DC_Delay (U32 Delay) |
| Carries out a delay. Simple procedure that carries out a delay of millisecond Delay. More... | |
| CTYPE const char *PROC_CALL | DC_ErrorMessage (int ErrorCode) |
| Convert an error code into an error message (string). DC_Status returns an error code of the previous operation, DC_ErrorMessage converts this code into a string message. More... | |
| CTYPE void PROC_CALL | DC_ErrorMessageVB (int ErrorCode, char *ErrorMessage) |
| Convert an error code into an error message (string). DC_Status returns an error code of the previous operation, DC_ErrorMessage converts this code into a string message. More... | |
| CTYPE const char DLL_P | DC_FamtoName (int CameraFamily) |
| Convert a camera family code (Camera Family) into a string. More... | |
| CTYPE void DLL | DC_FamtoNameVB (int CameraFamily, char *FamilyName) |
| Convert a camera family code (Camera Family) into a string. More... | |
| CTYPE void DLL | DC_FGetCCD (int Mode, double Exposure, U16 *mat, int Camera) |
| Get an image at full resolution. The same procedure as DC_GetCCD, as far as parameters are concerned, but with a basic difference: the DC_GetCCD disables the background task before taking an image to reactivate it immediately after having shot the image. As the background task on/off operation takes a lot, this procedure does not carry out the operation though you are asked to perform it. In other words, any time you carry out a sequence of images at the highest possible speed, you have to disable the background task first (DC_StopNow), then take a sequence of images following this necessary procedure and finally restore the background task (DC_StartNow). More... | |
| CTYPE void DLL | DC_FGetWinCCD (int Mode, double Exposure, int sx, int sy, int dx, int dy, U16 *mat, int Camera) |
| Read a Region Of Interest. The same procedure as DC_GetWinCCD, as far as parameters are concerned, but with a basic difference: the DC_GetWinCCD disables the background task before taking an image to reactivate it immediately after having shot the image. As the background task on/off operation takes a lot, this procedure does not carry out the operation though you are asked to perform it. In other words, any time you carry out a sequence of images at the highest possible speed, you have to disable the background task first (DC_StopNow), then take a sequence of images following this necessary procedure and finally restore the background task (DC_StartNow). More... | |
| CTYPE void DLL | DC_FlushAcquisition (int Camera) |
| Flush currently armed acquisition. More... | |
| CTYPE U16 DLL | DC_GetAD (int channel, int Camera) |
| Get the A/D converter for a specified channel. More... | |
| CTYPE void DLL | DC_GetBinning (int *HorValue, int *VerValue, int Camera) |
| Get the current horizontal and vertical binning value. More... | |
| CTYPE void DLL | DC_GetCCD (int Mode, double Exposure, U16 *mat, int Camera) |
| Get an image at full resolution. Procedure that allows you to read an image, given an exposure time expressed in seconds in the Exposure variable and memorized in the array mat. The array mat must be given a dimension according to: dimx x dimy x 2. The camera parameter specifies which camera of the array is being used (if this mode is active). The mode parameter manages the shutter; setting at 0 a dark shot can be performed.; at 1 an image can be taken. More... | |
| CTYPE void DLL | DC_GetCCDdata (ccd *cfg, int camera) |
| CTYPE void DLL | DC_GetCCDPulsed (int Mode, int Fast, double Pulse, double Exposure, U16 *mat, int Camera) |
| Get an image at full resolution. Procedure that allows you to read an image, given an exposure time expressed in seconds in the Exposure variable with an opening shutter time expressed in seconds in the Pulse and memorized in the array mat. The array mat must be given a dimension according to: dimx x dimy x 2. The camera parameter specifies which camera of the array is being used (if this mode is active). The mode parameter manages the shutter; setting at 0 a dark shot can be performed.; at 1 an image can be taken. More... | |
| CTYPE int DLL | DC_GetCCDX (int Camera) |
| CTYPE int DLL | DC_GetCCDY (int Camera) |
| CTYPE int DLL | DC_GetDimX (int Camera) |
| Procedure that returns the number of horizontal pixels of the CCD divided by the horizontal binning value. More... | |
| CTYPE int DLL | DC_GetDimY (int Camera) |
| Procedure that returns the number of vertical pixels of the CCD divided by the vertical binning value. More... | |
| CTYPE int DLL | DC_GetDNR (int Camera) |
| Retrieve the current value of the noise reducer. More... | |
| CTYPE U32 DLL | DC_GetFDLPCIAddress (int FDLPCIChannel) |
| Retrieve the base address of the selected FDl-PCI. More... | |
| CTYPE U16 DLL | DC_GetFDLPCIRevision (int FDLPCIChannel, int camera) |
| CTYPE int DLL | DC_GetGain (int Camera) |
| Read the current gain. Procedure that allows you to read the gain of the set CCD The values that can be read in the gain variable range from 0 to 3, with 0 representing the minimum gain and 3 the maximum one. More... | |
| CTYPE void DLL | DC_GetHPdata (ptf *cfg, int camera) |
| CTYPE void DLL | DC_GetImage (U16 *mat, int Camera) |
| Retrive the acquired image. More... | |
| CTYPE int DLL | DC_GetMode (int camera) |
| CTYPE double DLL | DC_GetPower (int Camera) |
| Return current cooler power. Procedure that allows you to read the power (%) of the cooler currently used; its value in a field ranging from 0 to 100.0. More... | |
| CTYPE U32 DLL | DC_GetSerNum (int Camera) |
| Procedure that reads the serial number of the camera. More... | |
| CTYPE U16 DLL | DC_GetStatus (U16 StatusAddress, int camera) |
| CTYPE double DLL | DC_GetTemp (char *CurrentTemperature, int Scale, int Camera) |
| Procedure that allows you to read the temperature of the sensor. Procedure that allows you to read the temperature of the sensor in the scale measurement unity specified as parameter. The result is placed in the pointer at the temp string that must have a minimum dimension of 16 characters. Definitions of scales accepted: KELVIN CELSIUS FAHRENHEIT . More... | |
| CTYPE int DLL | DC_GetTempHistory (double *data, int camera) |
| CTYPE void DLL | DC_GetWinCCD (int Mode, double Exposure, int sx, int sy, int dx, int dy, U16 *mat, int Camera) |
| Read a Region Of Interest. Procedure that allows you to read an image by selecting a defined area of the ccd. More... | |
| CTYPE void DLL | DC_GetWinCCDPulsed (int Mode, int Fast, double Pulse, double Exposure, int sx, int sy, int dx, int dy, U16 *mat, int Camera) |
| Read a Region Of Interest. Procedure that allows you to read an image by selecting a defined area of the ccd in pulsed mode. More... | |
| CTYPE void DLL | DC_InitCfg (config *CameraConfig) |
| Initialize config variable. Initialize with default value the cnf variable. More... | |
| CTYPE void DLL | DC_InitOptions (config *CameraConfig, int camera) |
| CTYPE int DLL | DC_IsOn (int Camera) |
| CTYPE int DLL | DC_IsThereFW (int camera) |
| Return the filter wheel type if exists. More... | |
| CTYPE void DLL | DC_Kinetics (int Mode, double Exposure, int NumOfFrames, int sx, int sy, int dx, int dy, U16 **mat, int Camera) |
| Take a sequence of images in kinetic mode There is the possibility to use a full-frame as a pseudo frame-transfer. Let's say that we'd like to quickly get images of Saturn by means of a 1024x1024 full frame sensor. Conditions:
| |
| CTYPE void DLL | DC_KineticsCCD (int Mode, double Exposure, int NumOfFrames, int dy, U16 *mat, int Camera) |
| Take a sequence of images in kinetic mode There is the possibility to use a full-frame as a pseudo frame-transfer. Let's say that we'd like to quickly get images of Saturn by means of a 1024x1024 full frame sensor. Conditions:
| |
| CTYPE void DLL | DC_LibraryInit (void) |
| Library initialization. Please call this procedure before any one but inly in explicit mode. More... | |
| CTYPE int DLL | DC_LoadCameraConfig (const char *PathName, config *CameraConfig) |
| Load camera configuration from a specified file. More... | |
| CTYPE int DLL | DC_LoadCCD (int ccdCode, int camera) |
| CTYPE int DLL | DC_LoadPlatform (int platformCode, int ccdCode, int camera) |
| CTYPE void DLL | DC_Matrix (int Operation, int Camera) |
| Procedure that handle the image buffer. A maximum of 16 image buffer can be allocated. More... | |
| CTYPE int DLL | DC_MatrixGet (int Camera) |
| Return the active image buffer. More... | |
| CTYPE U16 DLL_P | DC_MatrixPointer (int Select, int Camera) |
| Return the pointer of an allocated image buffer. More... | |
| CTYPE U16 DLL | DC_MatrixRead (int x, int y, int Camera) |
| Read a selected pixel from the internal image buffer. More... | |
| CTYPE void DLL | DC_MatrixSet (int Select, int Camera) |
| Select an internal allocated image memory buffer. More... | |
| CTYPE U32 DLL | DC_MatrixSize (int Camera) |
| Return the size of the active image buffer. More... | |
| CTYPE U16 DLL | DC_MaxNumbers (int Camera) |
| Maximum value present in an acquired image. More... | |
| CTYPE void DLL | DC_ObjectiveControl (int Command, U16 Parameter, int Camera) |
| It allows one to control a motorized objective. More... | |
| CTYPE void DLL | DC_Open (int Platform, int Sensor, int PortAddress, int InterfaceModel, int StartMode, int Camera, int TaskSettings, DTA1_CB CountDownCallBack, DTA2_CB StatusBarCallBack) |
| Open the camera. Procedure which initializes the camera, checks its presence and proceeds to load the necessary patterns, it also activates, if required, the background tasks which manage CCD temperature and cleaning. It must be noted that when the camera is initialized the binning default is 1x1. Various parameters are required. More... | |
| CTYPE void DLL | DC_OpenArray (ccdarray *CameraArrayConfiguration, int Platform, int Sensor, int StartMode, int TaskSettings, int Camera, DTA1_CB CountDownCallBack, DTA2_CB StatusBarCallBack) |
| Procedure that initializes an array of CHROMA cameras. Procedure that initializes an array of Chroma cameras, it controls its presence and proceeds to load the necessary patterns. It also activates, if required, the background tasks that manage the CCD temperature and cleaning. It is important to note that when the camera is initialized the default binning is 1x1. This mode is available only for CHROMA, C3, C3+, C4 camera model. More... | |
| CTYPE void DLL | DC_OpenByConfig (config *CameraConfig, int StartMode, DTA1_CB CountDownCallBack, DTA2_CB StatusBarCallBack) |
| Open the camera. Open the camera using the settings specified in CameraConfig structure data (see config). More... | |
| CTYPE int DLL | DC_OpenByFile (char *ConfigFile, int StartMode, DTA1_CB dwn, DTA2_CB per) |
| Open the camera. Open the camera using the settings specified in CameraConfig file. The default path name is ./dcl/. This file is setted by the utility program dcs.exe. More... | |
| CTYPE void DLL | DC_OpenFW (int speed, int torque, int offset, int Camera) |
| Initialize and calibrate the filter wheel. Procedure that initializes the filter wheel , the speed parameter is the positioning speed which will be applied, while torque is the pair motor that will be applied to keep the position. In addition to setting the parameters, it also carries out the calibration by placing the filter wheel on the first filter. More... | |
| CTYPE int DLL | DC_OpenPar (int Platform, int Sensor, int Camera) |
| Procedure that initializes dcl internal data structure. Procedure that initializes the DC_HP and DC_CCD data structure. These data structures are usually inizialized by the DC_Open, but this is the best way to analyze the functioning parameters of the camera without passing through the DC_Open. More... | |
| CTYPE U16 DLL | DC_Peek (U16 RAMAddress, int camera) |
| CTYPE U16 DLL | DC_PeekW (U16 RAMAddress, int camera) |
| CTYPE int DLL | DC_Plug (int parCnt, int *param, int camera) |
| Command used to send special commands to custom cameras. More... | |
| CTYPE void DLL | DC_Poke (U16 RAMAddress, U16 Data, int camera) |
| CTYPE void DLL | DC_PokeW (U16 RAMAddress, U16 Data, int camera) |
| CTYPE const char DLL_P | DC_PtfName (int CameraId, int camera) |
| CTYPE void DLL | DC_PtfNameVB (int CameraId, char *PlatformName, int camera) |
| CTYPE const char DLL_P | DC_PTFtoName (int PlatFormCode, int camera) |
| CTYPE void DLL | DC_PTFtoNameVB (int PlatFormCode, char *PlatformName, int camera) |
| CTYPE S32 DLL | DC_QuerySts (int Command, int Camera) |
| Retrieve the status of operations in progress. More... | |
| CTYPE U16 DLL | DC_RDReg (U16 RegisterAddress, int camera) |
| CTYPE U16 DLL | DC_ReadEP (U16 EEpromAddress, int camera) |
| CTYPE double DLL | DC_ReadTemp (int Scale, int camera) |
| CTYPE U16 DLL | DC_RMReg (U16 RegisterAddress, int camera) |
| CTYPE void DLL | DC_RWData (int LibraryVariable, int rw, void *data, int Camera) |
| Procedure that allows read/write operation on a variable used into the library. More... | |
| CTYPE int DLL | DC_SaveCameraConfig (const char *PathName, config *CameraConfig) |
| Save camera configuration into a file. More... | |
| CTYPE int DLL | DC_SaveCCD (int ccdCode, int camera) |
| CTYPE int DLL | DC_SavePlatform (int platformCode, int ccdCode, int camera) |
| CTYPE void DLL | DC_Select (int Camera) |
| Select the camera to be used. This function selects the camera to be used (0 - 7), by selecting different FDL-PCI boards into the system. Many high level procedures have a specific parameter but for low level interations with the camera this procedure must be used. More... | |
| CTYPE void DLL | DC_SetBinning (int HorValue, int VerValue, int Camera) |
| Set the horizontal and vertical binning value. This procedure accepts arbitrary values in the range between 1 to 16384. With an high binning value pattern generator may overflow. More... | |
| CTYPE void DLL | DC_SetBitDecimation (int NumOfBit, int Camera) |
| Change the number of bits of the A/D converter. More... | |
| CTYPE void DLL | DC_SetDNR (int DNRValue, int Camera) |
| Reduce camera noise with different levels. More... | |
| CTYPE void DLL | DC_SetFanSpeed (double FanSpeed, int Camera) |
| Procedure that allows you to set the speed of the fan cooler. Procedure that allows you to set the speed (%) of the cooler's fan currently used; its value is loaded in the power variable in a field ranging from 0 to 100.0; one decimal is accepted. More... | |
| CTYPE void DLL | DC_SetFDLPCI (int FDLPCIChannel, int camera) |
| CTYPE void DLL | DC_SetFilter (int Filter, int Camera) |
| Procedure that places the wheel on a filter. More... | |
| CTYPE void DLL | DC_SetFunction (int WichFunction, DTA_FN FunctionPointer, int camera) |
| CTYPE void DLL | DC_SetFW (int speed, int torque, int offset, int Camera) |
| Procedure that loads the control parameters of the filter wheel. More... | |
| CTYPE int DLL | DC_SetGain (int Gain, int Camera) |
| Change the ratio between ADU and electrons. Procedure that allows you to set ccd gains, according to preset values in four various values. More... | |
| CTYPE void DLL | DC_SetMode (int TaskSettings, int SetRes, int camera) |
| CTYPE void DLL | DC_SetPathName (char *Path) |
| Set the pathname for all dcl files. More... | |
| CTYPE void DLL | DC_SetPower (double CoolerPower, int Camera) |
| Procedure that allows you to set the cooler power. Procedure that allows you to set the power (%) of the cooler currently used; its value is loaded in the power variable in a field ranging from 0 to 100.0; one decimal is accepted. More... | |
| CTYPE void DLL | DC_SetSerNum (U32 SerialNumber, int Ext, int Camera) |
| Procedure that writes the serial number of the camera. More... | |
| CTYPE void DLL | DC_SetTemp (double TargetTemperature, int Scale, int Camera) |
| Procedure that turns the camera cooler on and allows you to set an operative temperature of the CCD. The TargetTemperature variable is the temperature at which the ccd will have to work, while scale shows the measurement unity of the temperature. The TargetTemperature variable may also be expressed with decimals but it is important to remember that thermostatation precision is �0. �C. This procedure can only be used if the flag TEMPHANDLE is activated in the DC_Open. Definitions of scales accepted: KELVIN CELSIUS FAHRENHEIT . More... | |
| CTYPE void DLL | DC_SetUsrGain (int Gain, int Range, int Offset, int Camera) |
Procedure that allows you to set the ccd gain. Procedure that allows you to set the ccd gain. The values that can be loaded in the gain variable range from 0 to 127 for the CHROMA or from 0 to 63 for the other cameras. The range parameter can be 0 or 1 the offset parameter accepts a value which is digitally subtracted from the acquired image. To find the e- / ADU ratio the following formula must be applied:  Where: ADR = Input range of the A/D convertor in volts. BIT = Divisions of the A/D convertor (2n). CCF = Charge Conversion Factor of the CCD expressed in uV. GAIN = Gain factor used. For A/D converters with 64 gains the gain factor can be obtained with the following formula:  Where N is a number included between 0 and 63. The OFFSET parameter is a value that varies from 0 to 511 with a range from -300 mV a +300mV with the following codification: 1 +1.2 mv 255 +300 mv 256 0 mv 257 -1.2 mv 511 -300 mv . More... | |
| CTYPE void DLL | DC_Shutter (double TimeExposure, int camera) |
| CTYPE void DLL | DC_ShutterControl (int mode, int camera) |
| CTYPE void DLL | DC_StartAcquisition (int mode, int Camera) |
| Start the camera acquisition. More... | |
| CTYPE void DLL | DC_StartNow (int camera) |
| CTYPE int DLL | DC_Status (int Camera) |
| Return the status of the last operations performed on the camera. This procedure allows you to check the status of the last operations performed on the camera. More... | |
| CTYPE void DLL | DC_StopNow (int camera) |
| CTYPE void DLL | DC_SubSelect (int Camera, int subcamera) |
| Select which camera, linked to the multiplexer, will be used. By means of this function it's possible to control each camera linked with the multiplexer. More... | |
| CTYPE void DLL | DC_TempCalib (double kto, double kt, int Camera) |
| Calibrate temperature sensor. First generation of iCAM camera doesn't have internal temperature sensor calibration. This procedure provides the calibration of this device. More... | |
| CTYPE int DLL | DC_TemperatureHandle (int camera) |
| CTYPE void DLL | DC_TGetCCD (int Mode, double Exposure, U16 *mat, int Camera) |
| Get an image at full resolution. The same procedure as DC_FGetCCD as far as parameters are concerned , but with a basic difference : the DC_FGetCCD can carry out a synchronization on an external event (TRIGGER) with a software sampling while keeping the clear CCD active. As a result, from the time the trigger event gets started, the following image can have several ten millisecond delay (according to both the PC and the camera) and it can not be reproduced from an image to the following one. On the other hand, this procedure also shows a way to synchronize the image shooting by means of the external trigger which can have a jitter up to a few ten nonosecond. The background has to be deactivated. More... | |
| CTYPE int DLL | DC_Trigger (int Loop, int camera) |
| CTYPE int DLL | DC_Ver (char *LibraryVersion) |
| Return the library version. Procedure returning the number of the revision of the library. This procedure provides the library revision according to two different formats: as an integer (through the return code), or as a string. By passing a pointer in the parameter, this can be a NULL if you do not want to make the most of this mode. The return code is an integer thus codified: 110 is 1.1.0. More... | |
| CTYPE int DLL | DC_WDVer (char *ver, int camera) |
| CTYPE void DLL | DC_WMReg (U16 add, U16 data, int camera) |
| CTYPE void DLL | DC_WriteEP (U16 EEpromAddress, U16 Data, int camera) |
| CTYPE void DLL | DC_WRReg (U16 RegisterAddress, U16 Data, int camera) |
Detailed Description
Function prototypes.
Definition in file dcl.h.
Function Documentation
§ _DC_Open()
| void _DC_Open | ( | int | Platform, |
| int | Sensor, | ||
| int | PortAddress, | ||
| int | InterfaceModel, | ||
| int | StartMode, | ||
| int | Camera, | ||
| int | TaskSettings | ||
| ) |
Open the camera. The same procedure as DC_Open, but without the last two parameters (functional pointers). Such procedure became necessary because of the use of the library with LabView as it does not allow one to use this kind of parameters.
- Parameters
-
Platform Variable which shows the kind of ccd camera you want to use, the index numbers for the various models Camera platform definitions Sensor Variable specifying what kind of sensor is being used on the camera selected. CCD code definitions PortAddress Variable which specifies the interface address, some of these do not allow for a manual allocation of the physical address (PCI), in this case the loaded value will be ignored. InterfaceModel Variable which specifies the kind of interface used Camera Interface StartMode Variable which allows to control whether the cooler should be on or off. In pratice if the camera is already at the right temperature this is not varied if StartMode is set at 1. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7. TaskSettings Variable managed by bits which allows you to set various functioning modalities of the camera. Control bit
- Returns
- void
- See also
- DC_Open, DC_OpenByConfig, DC_Status, DC_Close.
§ _DC_OpenByFile()
| void _DC_OpenByFile | ( | char * | CameraConfig, |
| int | StartMode | ||
| ) |
Open the camera. The same procedure as DC_OpenByFile, but without the last two parameters (functional pointers). Such procedure became necessary because of the use of the library with LabView as it does not allow one to use this kind of parameters.
- Parameters
-
CameraConfig Specify the path of the camera configuration file. StartMode Variable which allows to control whether the cooler should be on or off. In pratice if the camera is already at the right temperature this is not varied if StartMode is set at 1. CountDownCallBack Procedure pointer used to visualise countdown during exposure if this value is higher than 0.5 s. The procedure that has to be defined must have as its prototype: int name(char *str). If this function is not required NULL can be set. StatusBarCallBack Procedure pointer used to visualise the percentage of the image read. The procedure that has to be defined must have as its prototype: int name(char *str, int perc). If this function is not required NULL can be set.
- Returns
- FDL-PCI index (0 - 7).
- See also
- DC_Open, _DC_Open, DC_Status, DC_Close, DC_OpenByFile, DC_OpenByConfig.
§ DC_AGetCCD()
§ DC_ArmAcquisition()
| void DC_ArmAcquisition | ( | double | Exposure, |
| int | Camera | ||
| ) |
Arm the camera acquisition.
- Parameters
-
Exposure Exposure time expressed in seconds. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
§ DC_ArmTimerHandle()
§ DC_BckBusy()
| U32 DC_BckBusy | ( | int | Camera | ) |
Return the CPU time (ms) used by background activity.
- Parameters
-
Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- Time measure in ms.
§ DC_BckGnd()
| U32 DC_BckGnd | ( | int | Camera | ) |
Return a background operation counter. Counter variable, which is increased at each background process action, this process is activated each time the camera is initialized with at least one of the CCDHANDLE or TEMPHANDLE options.
- Parameters
-
Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- Counts
§ DC_BrkFlg()
§ DC_CalibFW()
| void DC_CalibFW | ( | int | Camera | ) |
It carries out the calibration of the filter wheel by placing it on the first filter.
- Parameters
-
Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
- See also
- DC_Status
§ DC_CamQuery()
| int DC_CamQuery | ( | int * | CameraList | ) |
Return the list and the numbver of the camera handled by the library.
- Parameters
-
CameraList A pointer to an integer array.
- Returns
- The number of camera models being handled and the relevant code list via CameraList parameter.
§ DC_CCDQuery()
| int DC_CCDQuery | ( | int | SelectedCamera, |
| int * | CCDList | ||
| ) |
Return the list (CCD code definitions) and the number of the CCD being used by selected camera.
- Parameters
-
SelectedCamera The code of the used camera (C3, HIRES, ...). CCDList A pointer to an integer array.
- Returns
- The number of the CCDs available for the selected camera.
- The code list of all available CCDs via CCDList parameter.
§ DC_CCDtoName()
§ DC_CCDtoNameVB()
§ DC_CheckTempEquil()
§ DC_ClearCCD()
§ DC_Close()
| void DC_Close | ( | int | Camera | ) |
Shuts down the control operations of the camera. Procedure that shuts down the control operations of the camera. It is always important to carry out this procedure at the end of the application you are writing, as the resources required by the operative system must be not be in use. As a matter of fact, if this procedure is not carried out and you attempt another work session at a later date you will receive a message that an error has occurred.
- Parameters
-
Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
- See also
- DC_Status.
Referenced by DB_InitCamera(), ShutCB(), and WinRes().
Here is the caller graph for this function:§ DC_Cooler()
| void DC_Cooler | ( | int | Mode, |
| int | Camera | ||
| ) |
Procedure that allows you to control the cooler manually. Procedure that allows you to control the cooler manually. In the parameter Mode if you insert 1 the cooler is turned on, if you insert 0 it is turned off.
- Parameters
-
Mode Cooler control command Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
Referenced by ShutCB().
Here is the caller graph for this function:§ DC_CoolerStatus()
| int DC_CoolerStatus | ( | int | Camera | ) |
Procedure that reports the activity status of the cooler.
- Parameters
-
Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- the following codes:
0 = Deactivated cooler.
1 = Active cooler without thermostatization control.
2 = Active cooler with thermostatization control but in search of the balance of the set temperature.
3 = Balanced temperature control with set value.
4 = Temperature shutdown in progress.
5 = Temperature shutdown carried out.
Referenced by Task_CCD_Temp().
Here is the caller graph for this function:§ DC_Delay()
| void DC_Delay | ( | U32 | Delay | ) |
Carries out a delay. Simple procedure that carries out a delay of millisecond Delay.
- Parameters
-
Delay Value in millisecons.
§ DC_ErrorMessage()
| char * DC_ErrorMessage | ( | int | ErrorCode | ) |
Convert an error code into an error message (string). DC_Status returns an error code of the previous operation, DC_ErrorMessage converts this code into a string message.
- Parameters
-
ErrorCode DC_Status error code, 0 will be considered as a non-error code.
- Returns
- a string pointer to the error message, an incorrect error code or the zero value return a NULL.
- See also
- DC_Status
Referenced by InitCCD_AMS(), and ShutCB().
Here is the caller graph for this function:§ DC_ErrorMessageVB()
| void DC_ErrorMessageVB | ( | int | ErrorCode, |
| char * | ErrorMessage | ||
| ) |
Convert an error code into an error message (string). DC_Status returns an error code of the previous operation, DC_ErrorMessage converts this code into a string message.
- Parameters
-
ErrorCode DC_Status error code, 0 will be considered as a non-error code. ErrorMessage Output of the error message.
- See also
- DC_Status
§ DC_FamtoName()
| char * DC_FamtoName | ( | int | CameraFamily | ) |
Convert a camera family code (Camera Family) into a string.
- Parameters
-
CameraFamily the code of the camera family (Camera Family).
- Returns
- The name (as a string) of the requested camera family.
§ DC_FamtoNameVB()
| void DC_FamtoNameVB | ( | int | CameraFamily, |
| char * | FamilyName | ||
| ) |
Convert a camera family code (Camera Family) into a string.
- Parameters
-
CameraFamily the code of the camera family (Camera Family). FamilyName Output, as string, of the family name.
§ DC_FGetCCD()
| void DC_FGetCCD | ( | int | Mode, |
| double | Exposure, | ||
| U16 * | mat, | ||
| int | Camera | ||
| ) |
Get an image at full resolution. The same procedure as DC_GetCCD, as far as parameters are concerned, but with a basic difference: the DC_GetCCD disables the background task before taking an image to reactivate it immediately after having shot the image. As the background task on/off operation takes a lot, this procedure does not carry out the operation though you are asked to perform it. In other words, any time you carry out a sequence of images at the highest possible speed, you have to disable the background task first (DC_StopNow), then take a sequence of images following this necessary procedure and finally restore the background task (DC_StartNow).
- Parameters
-
Mode If it is set to 0 it performs a dark shot.; to 1 it takes an image. Exposure Exposure time expressed in seconds. mat Linear array where an image is memorized. The array mat must be dimensioned according to: dx x dy x 2. If this parameter is setted to MAT_NULL or if you have selected MEMALLOC in TaskSettings parameter of DC_Open (or equivalent), the image will be loaded into the internal selected buffer. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
§ DC_FGetWinCCD()
| void DC_FGetWinCCD | ( | int | Mode, |
| double | Exposure, | ||
| int | sx, | ||
| int | sy, | ||
| int | dx, | ||
| int | dy, | ||
| U16 * | mat, | ||
| int | Camera | ||
| ) |
Read a Region Of Interest. The same procedure as DC_GetWinCCD, as far as parameters are concerned, but with a basic difference: the DC_GetWinCCD disables the background task before taking an image to reactivate it immediately after having shot the image. As the background task on/off operation takes a lot, this procedure does not carry out the operation though you are asked to perform it. In other words, any time you carry out a sequence of images at the highest possible speed, you have to disable the background task first (DC_StopNow), then take a sequence of images following this necessary procedure and finally restore the background task (DC_StartNow).
- Parameters
-
Mode If it is set to 0 it performs a dark shot.; to 1 it takes an image. Exposure Exposure time expressed in seconds. sx Coordinates of origin of the window. sy Coordinates of origin of the window. dx Dimension of the window in pixels. dy Dimension of the window in pixels. mat Linear array where an image is memorized. The array mat must be dimensioned according to: dx x dy x 2. If this parameter is setted to MAT_NULL or if you have selected MEMALLOC in TaskSettings parameter of DC_Open (or equivalent), the image will be loaded into the internal selected buffer. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7. 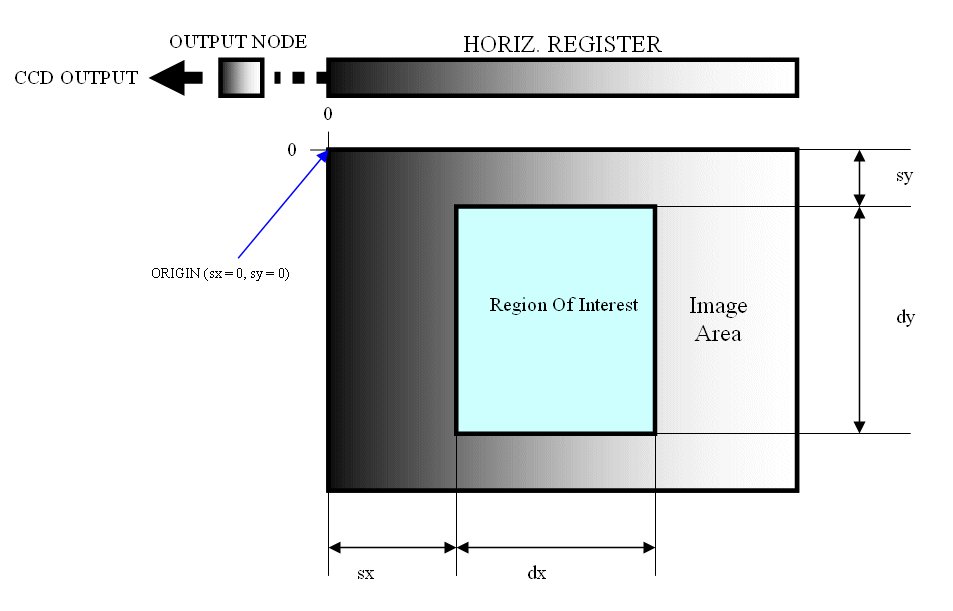
- Returns
- void
§ DC_FlushAcquisition()
| DC_FlushAcquisition | ( | int | Camera | ) |
Flush currently armed acquisition.
- Parameters
-
Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
§ DC_GetAD()
| U16 DC_GetAD | ( | int | channel, |
| int | Camera | ||
| ) |
Get the A/D converter for a specified channel.
- Parameters
-
A/D channel
- Returns
- A/D counts
§ DC_GetBinning()
| void DC_GetBinning | ( | int * | HorValue, |
| int * | VerValue, | ||
| int | Camera | ||
| ) |
Get the current horizontal and vertical binning value.
- Parameters
-
HorValue pointer to a variable for the horizontal value. VerValue pointer to a variable for the vertical value. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- HorValue, VerValue
§ DC_GetCCD()
| void DC_GetCCD | ( | int | Mode, |
| double | Exposure, | ||
| U16 * | mat, | ||
| int | Camera | ||
| ) |
Get an image at full resolution. Procedure that allows you to read an image, given an exposure time expressed in seconds in the Exposure variable and memorized in the array mat. The array mat must be given a dimension according to: dimx x dimy x 2. The camera parameter specifies which camera of the array is being used (if this mode is active). The mode parameter manages the shutter; setting at 0 a dark shot can be performed.; at 1 an image can be taken.
- Parameters
-
Mode If it is set to 0 it performs a dark shot.; to 1 it takes an image. Exposure Exposure time expressed in seconds. mat Linear array where an image is memorized. The array mat must be dimensioned according to: dx x dy x 2. If this parameter is setted to MAT_NULL or if you have selected MEMALLOC in TaskSettings parameter of DC_Open (or equivalent), the image will be loaded into the internal selected buffer. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
- See also
- DC_GetWinCCD, DC_FGetCCD, DC_TGetCCD, DC_FGetWinCCD, DC_Kinetics, DC_Status, DC_GetCCDPulsed, DC_GetWinCCDPulsed, DC_Kinetics, DC_KineticsCCD.
Referenced by DB_GetCCD(), and E_Dark().
Here is the caller graph for this function:§ DC_GetCCDdata()
§ DC_GetCCDPulsed()
| void DC_GetCCDPulsed | ( | int | Mode, |
| int | Fast, | ||
| double | Pulse, | ||
| double | Exposure, | ||
| U16 * | mat, | ||
| int | Camera | ||
| ) |
Get an image at full resolution. Procedure that allows you to read an image, given an exposure time expressed in seconds in the Exposure variable with an opening shutter time expressed in seconds in the Pulse and memorized in the array mat. The array mat must be given a dimension according to: dimx x dimy x 2. The camera parameter specifies which camera of the array is being used (if this mode is active). The mode parameter manages the shutter; setting at 0 a dark shot can be performed.; at 1 an image can be taken.
- Parameters
-
Mode If it is set to 0 it performs a dark shot.; to 1 it takes an image. Fast If != from zero the acquisition is taken in fast mode. Pulse Shutter opening time, value expressed in milliseconds. Exposure Exposure time expressed in seconds. mat Linear array where an image is memorized. The array mat must be dimensioned according to: dx x dy x 2. If this parameter is setted to MAT_NULL or if you have selected MEMALLOC in TaskSettings parameter of DC_Open (or equivalent), the image will be loaded into the internal selected buffer. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
§ DC_GetCCDX()
§ DC_GetCCDY()
§ DC_GetDimX()
| int DC_GetDimX | ( | int | Camera | ) |
Procedure that returns the number of horizontal pixels of the CCD divided by the horizontal binning value.
- Parameters
-
Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- The current value of the horizontal pixel of the image.
§ DC_GetDimY()
| int DC_GetDimY | ( | int | Camera | ) |
Procedure that returns the number of vertical pixels of the CCD divided by the vertical binning value.
- Parameters
-
Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- The current value of the vertical pixel of the image.
§ DC_GetDNR()
| int DC_GetDNR | ( | int | Camera | ) |
Retrieve the current value of the noise reducer.
- Parameters
-
Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
§ DC_GetFDLPCIAddress()
| U32 DC_GetFDLPCIAddress | ( | int | FDLPCIChannel | ) |
Retrieve the base address of the selected FDl-PCI.
- Parameters
-
FDLPCIChannel FDL-PCI selection (0 - 7).
§ DC_GetFDLPCIRevision()
§ DC_GetGain()
| int DC_GetGain | ( | int | Camera | ) |
Read the current gain. Procedure that allows you to read the gain of the set CCD The values that can be read in the gain variable range from 0 to 3, with 0 representing the minimum gain and 3 the maximum one.
- Parameters
-
Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- Return used gain.
§ DC_GetHPdata()
§ DC_GetImage()
| void DC_GetImage | ( | U16 * | mat, |
| int | Camera | ||
| ) |
Retrive the acquired image.
- Parameters
-
mat Linear array where an image is memorized. The array mat must be dimensioned according to: dx x dy x 2. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
§ DC_GetMode()
§ DC_GetPower()
| double DC_GetPower | ( | int | Camera | ) |
Return current cooler power. Procedure that allows you to read the power (%) of the cooler currently used; its value in a field ranging from 0 to 100.0.
- Parameters
-
Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- Cooler power in the range 0 to 100.0.
Referenced by DB_InitCamera(), and Task_CCD_Temp().
Here is the caller graph for this function:§ DC_GetSerNum()
| U32 DC_GetSerNum | ( | int | Camera | ) |
Procedure that reads the serial number of the camera.
- Parameters
-
Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- A 32 bit serial number with DTA coding (internal use)
§ DC_GetStatus()
§ DC_GetTemp()
| double DC_GetTemp | ( | char * | CurrentTemperature, |
| int | Scale, | ||
| int | Camera | ||
| ) |
Procedure that allows you to read the temperature of the sensor. Procedure that allows you to read the temperature of the sensor in the scale measurement unity specified as parameter. The result is placed in the pointer at the temp string that must have a minimum dimension of 16 characters. Definitions of scales accepted:
KELVIN
CELSIUS
FAHRENHEIT
.
- Parameters
-
CurrentTemperature is the current ccd temperature. Scale (Temperature scales). Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
Referenced by Task_CCD_Temp().
Here is the caller graph for this function:§ DC_GetTempHistory()
§ DC_GetWinCCD()
| void DC_GetWinCCD | ( | int | Mode, |
| double | Exposure, | ||
| int | sx, | ||
| int | sy, | ||
| int | dx, | ||
| int | dy, | ||
| U16 * | mat, | ||
| int | Camera | ||
| ) |
Read a Region Of Interest. Procedure that allows you to read an image by selecting a defined area of the ccd.
- Parameters
-
Mode If it is set to 0 it performs a dark shot.; to 1 it takes an image. Exposure Exposure time expressed in seconds. sx Coordinates of origin of the window. sy Coordinates of origin of the window. dx Dimension of the window in pixels. dy Dimension of the window in pixels. mat Linear array where an image is memorized. The array mat must be dimensioned according to: dx x dy x 2. If this parameter is setted to MAT_NULL or if you have selected MEMALLOC in TaskSettings parameter of DC_Open (or equivalent), the image will be loaded into the internal selected buffer. Camera Specify on which the FDL-PCI will be used for this operation, range 0 - 7. Set to 0 if you don't use the FDL-PCI interface.
- Returns
- void
§ DC_GetWinCCDPulsed()
| void DC_GetWinCCDPulsed | ( | int | Mode, |
| int | Fast, | ||
| double | Pulse, | ||
| double | Exposure, | ||
| int | sx, | ||
| int | sy, | ||
| int | dx, | ||
| int | dy, | ||
| U16 * | mat, | ||
| int | Camera | ||
| ) |
Read a Region Of Interest. Procedure that allows you to read an image by selecting a defined area of the ccd in pulsed mode.
- Parameters
-
Mode If it is set to 0 it performs a dark shot.; to 1 it takes an image. Fast If != from zero the acquisition is taken in fast mode. Pulse Shutter opening time, value expressed in milliseconds. Exposure Exposure time expressed in seconds. sx Coordinates of origin of the window. sy Coordinates of origin of the window. dx Dimension of the window in pixels. dy Dimension of the window in pixels. mat Linear array where an image is memorized. The array mat must be dimensioned according to: dx x dy x 2. If this parameter is setted to MAT_NULL or if you have selected MEMALLOC in TaskSettings parameter of DC_Open (or equivalent), the image will be loaded into the internal selected buffer. Camera Specify on which the FDL-PCI will be used for this operation, range 0 - 7. Set to 0 if you don't use the FDL-PCI interface.
- Returns
- void
§ DC_InitCfg()
| void DC_InitCfg | ( | config * | CameraConfig | ) |
§ DC_InitOptions()
§ DC_IsOn()
| int DC_IsOn | ( | int | Camera | ) |
- Parameters
-
Camera Specify on which FDL-PCI will be used for this operation, range 0 - 7. Set to 0 if you don't use FDL-PCI interface.
- Returns
- By means of value 1 this variable shows that the camera is active.
§ DC_IsThereFW()
| int DC_IsThereFW | ( | int | camera | ) |
Return the filter wheel type if exists.
- Returns
- Filter wheel type see Filter wheel types
§ DC_Kinetics()
| void DC_Kinetics | ( | int | Mode, |
| double | Exposure, | ||
| int | NumOfFrames, | ||
| int | sx, | ||
| int | sy, | ||
| int | dx, | ||
| int | dy, | ||
| U16 ** | mat, | ||
| int | Camera | ||
| ) |
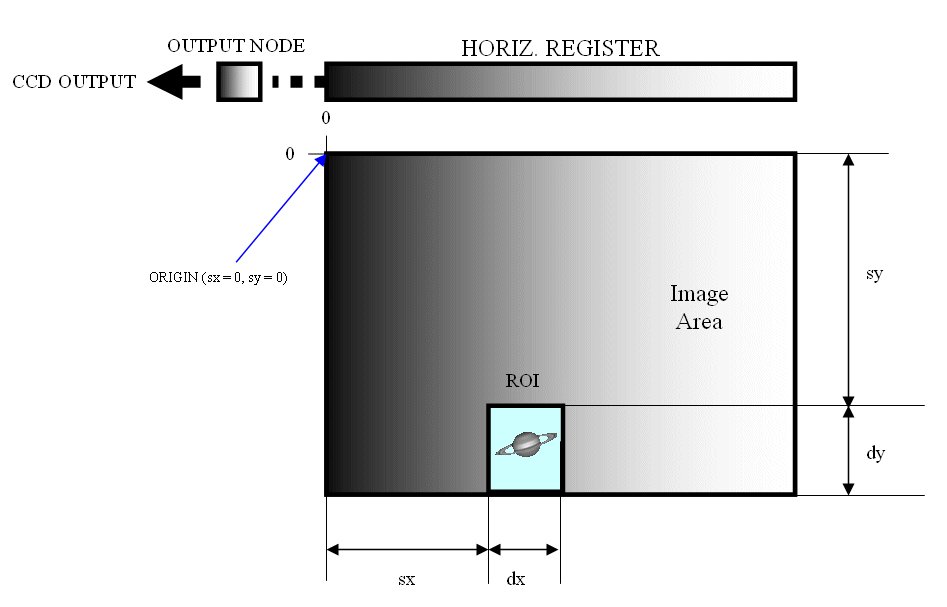
Take a sequence of images in kinetic mode There is the possibility to use a full-frame as a pseudo frame-transfer. Let's say that we'd like to quickly get images of Saturn by means of a 1024x1024 full frame sensor.
Conditions:
- You darken a part of the CCD leaving only a section exposed able to shoot the planet (for example 128 pixel high).
- You integrate for the desired time.
- You vertically shift only 128 pixel.
- Once the storage section is "filled", you download the section of the image (128 lines) with the following shift.
The speed with which you can shift the image varies according to different sensors; for example, for any Kodak one, the shift of one line takes 20 uS, while in the case of a E2V, it takes 100uS. So, in the example mentioned above the shuttering shift takes 2ms and 10ms respectively. Quicker values can be obtained by appropriately piloting the sensor. We must also add that the mask lamina has to be placed as much close to the sensor as possible, and we recommend to use an optical system with a high focal ratio. Please note that to evaluate the smearing, you also need to consider the ratio between the exposure time and the shift. You can get an arbitrary number of images; but you have to consider that the images memorized in the storage area accumulate dark current which is given by the number of frames multiplied by the exposure time. But, if the exposure time is short and the camera sufficiently cooled, the image is not significantly degraded.
Required constraints for this acquisition mode are:- Automatic clear CCD must be disabled, use DC_SetMode(CLEARCCD, 0);
- Automatic exposure with shutter must be disabled, use DC_SetMode(NOSHUTTER, 1);
- Shutter must be open during all acquisition, use DC_ShutterControl(1);
- The pixel height of the ROI must be a submultiple of the pixel height of the CCD, to prevent an incorrect sampling.
All these settings must be executed before DC_Kinetics, at the end you must restart initial conditions.
- Parameters
-
Mode If it is set to 0 it performs a dark shot.; to 1 it takes a sequence of images. Exposure Exposure time expressed in seconds. NumOfFrames Number of frames to take. sx Coordinates of origin of the window. sy Coordinates of origin of the window. dx Dimension of the window in pixels. dy Dimension of the window in pixels. mat Array of linear array where each image is memorized. Each array mat must be dimensioned according to: dx x dy x 2. If this parameter is setted to MAT_NULL or if you have selected MEMALLOC in TaskSettings parameter of DC_Open (or equivalent), the image will be loaded into the internal selected buffer. Camera Specify on which FDL-PCI operation will be performed. If the FDL-PCI doesn't use this parameter is ignored. Range 0 - 7.
- Returns
- void
§ DC_KineticsCCD()
| void DC_KineticsCCD | ( | int | Mode, |
| double | Exposure, | ||
| int | NumOfFrames, | ||
| int | dy, | ||
| U16 * | mat, | ||
| int | Camera | ||
| ) |
Take a sequence of images in kinetic mode There is the possibility to use a full-frame as a pseudo frame-transfer. Let's say that we'd like to quickly get images of Saturn by means of a 1024x1024 full frame sensor.
Conditions:
- You darken a part of the CCD leaving only a section exposed able to shoot the planet (for example 128 pixel high).
- You integrate for the desired time.
- You vertically shift only 128 pixel.
- Once the storage section is "filled", you download the section of the image (128 lines) with the following shift.
The speed with which you can shift the image varies according to different sensors; for example, for any Kodak one, the shift of one line takes 20 uS, while in the case of a E2V, it takes 100uS. So, in the example mentioned above the shuttering shift takes 2ms and 10ms respectively. Quicker values can be obtained by appropriately piloting the sensor. We must also add that the mask lamina has to be placed as much close to the sensor as possible, and we recommend to use an optical system with a high focal ratio. Please note that to evaluate the smearing, you also need to consider the ratio between the exposure time and the shift. You can get an image that contain a sequence of multiple exposure; but you have to consider that the images memorized in the storage area accumulate dark current which is given by the number of frames multiplied by the exposure time. But, if the exposure time is short and the camera sufficiently cooled, the image is not significantly degraded.
Required constraints for this acquisition mode are:- Automatic clear CCD must be disabled, use DC_SetMode(CLEARCCD, 0);
- Automatic exposure with shutter must be disabled, use DC_SetMode(NOSHUTTER, 1);
- Shutter must be open during all acquisition, use DC_ShutterControl(1);
- The pixel height of the ROI must be a submultiple of the pixel height of the CCD, to prevent an incorrect sampling.
All these settings must be executed before DC_Kinetics, at the end you must restart initial conditions.
- Parameters
-
Mode If it is set to 0 it performs a dark shot.; to 1 it takes a sequence of images. Exposure Exposure time expressed in seconds. NumOfFrames Number of frames to take. dy Dimension of the window in pixels. mat Array where the image is memorized. If this parameter is setted to MAT_NULL or if you have selected MEMALLOC in TaskSettings parameter of DC_Open (or equivalent), the image will be loaded into the internal selected buffer. Camera Specify on which FDL-PCI operation will be performed. If the FDL-PCI doesn't use this parameter is ignored. Range 0 - 7.
- Returns
- void
§ DC_LibraryInit()
| void DC_LibraryInit | ( | void | ) |
Library initialization. Please call this procedure before any one but inly in explicit mode.
§ DC_LoadCameraConfig()
| int DC_LoadCameraConfig | ( | const char * | PathName, |
| config * | CameraConfig | ||
| ) |
Load camera configuration from a specified file.
- Parameters
-
PathName Specify the path of the camera configuration file. CameraConfig Pointer to config type variable.
- Returns
- 0 on succes or 1 if fail.
Referenced by DB_InitCamera(), and Visualizza().
Here is the caller graph for this function:§ DC_LoadCCD()
§ DC_LoadPlatform()
§ DC_Matrix()
| void DC_Matrix | ( | int | Operation, |
| int | Camera | ||
| ) |
Procedure that handle the image buffer. A maximum of 16 image buffer can be allocated.
- Parameters
-
Operation control of the image buffer /ref imgbuf. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
- See also
- DC_Status
§ DC_MatrixGet()
| int DC_MatrixGet | ( | int | Camera | ) |
Return the active image buffer.
- Parameters
-
Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- Active image buffer
- See also
- DC_Matrix, DC_MatrixPointer, DC_MatrixSet, DC_MatrixRead, DC_MatrixSize
§ DC_MatrixPointer()
| U16 * DC_MatrixPointer | ( | int | Select, |
| int | Camera | ||
| ) |
Return the pointer of an allocated image buffer.
- Parameters
-
Select which internal image buffer will be read. Range 0 - 15 Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- Pointer to used image buffer.
- See also
- DC_Matrix, DC_MatrixSet, DC_MatrixGet, DC_MatrixRead, DC_MatrixSize
§ DC_MatrixRead()
| U16 DC_MatrixRead | ( | int | x, |
| int | y, | ||
| int | Camera | ||
| ) |
Read a selected pixel from the internal image buffer.
- Parameters
-
x,y Pixel coordinates Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- The value of selected pixel
- See also
- DC_Matrix, DC_MatrixPointer, DC_MatrixSet, DC_MatrixGet, DC_MatrixSize
§ DC_MatrixSet()
| void DC_MatrixSet | ( | int | Select, |
| int | Camera | ||
| ) |
Select an internal allocated image memory buffer.
Return the pointer of an allocated image buffer
- Parameters
-
Select activate which internal image buffer will be used. Range 0 - 15 Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
- See also
- DC_Matrix, DC_MatrixPointer, DC_MatrixGet, DC_MatrixRead, DC_MatrixSize
§ DC_MatrixSize()
| U32 DC_MatrixSize | ( | int | Camera | ) |
Return the size of the active image buffer.
- Parameters
-
Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- Return the size in bytes of the current image buffer
- See also
- DC_Matrix, DC_MatrixPointer, DC_MatrixSet, DC_MatrixGet, DC_MatrixRead
§ DC_MaxNumbers()
| U16 DC_MaxNumbers | ( | int | Camera | ) |
Maximum value present in an acquired image.
- Parameters
-
Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- The maximum value present in an acquired image. In practice this value varies according to the A/D convertor used, according to the table:
8bit 255
10bit 1023
12bit 4095
14bit 16383
16bit 65535
§ DC_ObjectiveControl()
| void DC_ObjectiveControl | ( | int | Command, |
| U16 | Parameter, | ||
| int | Camera | ||
| ) |
It allows one to control a motorized objective.
- Parameters
-
Command Specify which parameter we intend to change (Motorized objective control codes). Parameter Value of the control in the range 0 - 1999. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
§ DC_Open()
| void DC_Open | ( | int | Platform, |
| int | Sensor, | ||
| int | PortAddress, | ||
| int | InterfaceModel, | ||
| int | StartMode, | ||
| int | Camera, | ||
| int | TaskSettings, | ||
| DTA1_CB | CountDownCallBack, | ||
| DTA2_CB | StatusBarCallBack | ||
| ) |
Open the camera. Procedure which initializes the camera, checks its presence and proceeds to load the necessary patterns, it also activates, if required, the background tasks which manage CCD temperature and cleaning. It must be noted that when the camera is initialized the binning default is 1x1. Various parameters are required.
- Parameters
-
Platform Variable which shows the kind of ccd camera you want to use, the index numbers for the various models Camera platform definitions Sensor Variable specifying what kind of sensor is being used on the camera selected. CCD code definitions PortAddress Variable which specifies the interface address, some of these do not allow for a manual allocation of the physical address (PCI), in this case the value loaded will be ignored. InterfaceModel Variable which specifies the kind of interface used Camera Interface StartMode Variable which allows, to control whether the cooler should be on or off. In pratice if the camera is already at the right temperature this is not varied if StartMode is set at 1. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7. TaskSettings Variable managed by bits which allows you to set various functioning modalities of the camera. Control bit CountDownCallBack Procedure pointer used to visualise countdown during exposure if this value is higher than 0.5 s. The procedure that has to be defined must have as its prototype: int name(char *str). If this function is not required NULL can be set. StatusBarCallBack Procedure pointer used to visualise the percentage of the image read. The procedure that has to be defined must have as its prototype: int name(char *str, int perc). If this function is not required NULL can be set.
- Returns
- void
- See also
- _DC_Open, DC_OpenByConfig, DC_Status, DC_Close.
§ DC_OpenArray()
| void DC_OpenArray | ( | ccdarray * | CameraArrayConfiguration, |
| int | Platform, | ||
| int | Sensor, | ||
| int | StartMode, | ||
| int | TaskSettings, | ||
| int | Camera, | ||
| DTA1_CB | CountDownCallBack, | ||
| DTA2_CB | StatusBarCallBack | ||
| ) |
Procedure that initializes an array of CHROMA cameras. Procedure that initializes an array of Chroma cameras, it controls its presence and proceeds to load the necessary patterns. It also activates, if required, the background tasks that manage the CCD temperature and cleaning. It is important to note that when the camera is initialized the default binning is 1x1. This mode is available only for CHROMA, C3, C3+, C4 camera model.
- Parameters
-
CameraArrayConfiguration It's an array of structures (ccdarray) to setup each connected camera to the multiplexer. Platform Variable which shows the kind of ccd camera you want to use, the index numbers for the various models Camera platform definitions Sensor Variable specifying what kind of sensor is being used on the camera selected. CCD code definitions StartMode Variable which allows you to control whether the cooler should be on or off. In pratice if the camera is already at the right temperature this is not varied if StartMode is set at 1. TaskSettings Variable managed by bits which allows you to set various functioning modalities of the camera. Control bit Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7. CountDownCallBack Procedure pointer used to visualise countdown during exposure if this value is higher than 0.5 s. The procedure that has to be defined must have as its prototype: int name(char *str). If this function is not required NULL can be set. StatusBarCallBack Procedure pointer used to visualise the percentage of the image read. The procedure that has to be defined must have as its prototype: int name(char *str, int perc). If this function is not required NULL can be set.
- Returns
- void
- See also
- DC_Status
§ DC_OpenByConfig()
| void DC_OpenByConfig | ( | config * | CameraConfig, |
| int | StartMode, | ||
| DTA1_CB | CountDownCallBack, | ||
| DTA2_CB | StatusBarCallBack | ||
| ) |
Open the camera. Open the camera using the settings specified in CameraConfig structure data (see config).
- Parameters
-
CameraConfig Pointer to config type variable. StartMode Variable which allows to control whether the cooler should be on or off. In pratice if the camera is already at the right temperature this is not varied if StartMode is set at 1. CountDownCallBack Procedure pointer used to visualise countdown during exposure if this value is higher than 0.5 s. The procedure that has to be defined must have as its prototype: int name(char *str). If this function is not required NULL can be set. StatusBarCallBack Procedure pointer used to visualise the percentage of the image read. The procedure that has to be defined must have as its prototype: int name(char *str, int perc). If this function is not required NULL can be set.
- Returns
- void
- See also
- DC_Open, _DC_Open, DC_Status, DC_Close, DC_OpenByFile, _DC_OpenByFile.
Referenced by DB_InitCamera().
Here is the caller graph for this function:§ DC_OpenByFile()
| void DC_OpenByFile | ( | char * | CameraConfig, |
| int | StartMode, | ||
| DTA1_CB | CountDownCallBack, | ||
| DTA2_CB | StatusBarCallBack | ||
| ) |
Open the camera. Open the camera using the settings specified in CameraConfig file. The default path name is ./dcl/. This file is setted by the utility program dcs.exe.
- Parameters
-
CameraConfig Specify the path of the camera configuration file. StartMode Variable which allows to control whether the cooler should be on or off. In pratice if the camera is already at the right temperature this is not varied if StartMode is set at 1. CountDownCallBack Procedure pointer used to visualise countdown during exposure if this value is higher than 0.5 s. The procedure that has to be defined must have as its prototype: int name(char *str). If this function is not required NULL can be set. StatusBarCallBack Procedure pointer used to visualise the percentage of the image read. The procedure that has to be defined must have as its prototype: int name(char *str, int perc). If this function is not required NULL can be set.
- Returns
- FDL-PCI index (0 - 7).
- See also
- DC_Open, _DC_Open, DC_Status, DC_Close, _DC_OpenByFile, DC_OpenByConfig.
§ DC_OpenFW()
| void DC_OpenFW | ( | int | speed, |
| int | torque, | ||
| int | offset, | ||
| int | Camera | ||
| ) |
Initialize and calibrate the filter wheel. Procedure that initializes the filter wheel , the speed parameter is the positioning speed which will be applied, while torque is the pair motor that will be applied to keep the position. In addition to setting the parameters, it also carries out the calibration by placing the filter wheel on the first filter.
- Parameters
-
speed of the the filter positioning, accept values in the range 0 - 39. torque of the filter holding when positioned, accept values in the range 0 - 3. offset of the filter, accept values in the range +/- 10. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
- See also
- DC_Status
§ DC_OpenPar()
| int DC_OpenPar | ( | int | Platform, |
| int | Sensor, | ||
| int | Camera | ||
| ) |
Procedure that initializes dcl internal data structure. Procedure that initializes the DC_HP and DC_CCD data structure. These data structures are usually inizialized by the DC_Open, but this is the best way to analyze the functioning parameters of the camera without passing through the DC_Open.
- Parameters
-
Platform Variable which shows the kind of ccd camera you want to use, the index numbers for the various models Camera platform definitions Sensor Variable specifying what kind of sensor is being used on the camera selected. CCD code definitions Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
Referenced by DB_InitCamera(), and Visualizza().
Here is the caller graph for this function:§ DC_Peek()
§ DC_PeekW()
§ DC_Plug()
| int DC_Plug | ( | int | parCnt, |
| int * | param, | ||
| int | camera | ||
| ) |
Command used to send special commands to custom cameras.
- Parameters
-
parCnt Number of parameters. param Parameter list. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- Return code or data.
§ DC_Poke()
§ DC_PokeW()
§ DC_PtfName()
§ DC_PtfNameVB()
§ DC_PTFtoName()
§ DC_PTFtoNameVB()
§ DC_QuerySts()
| S32 DC_QuerySts | ( | int | Command, |
| int | Camera | ||
| ) |
Retrieve the status of operations in progress.
- Parameters
-
Command Available command for QuerySts function (Available command for QuerySts function) Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- 1 for "operation running" 0 for done
§ DC_RDReg()
§ DC_ReadEP()
§ DC_ReadTemp()
§ DC_RMReg()
§ DC_RWData()
| void DC_RWData | ( | int | LibraryVariable, |
| int | rw, | ||
| void * | data, | ||
| int | Camera | ||
| ) |
Procedure that allows read/write operation on a variable used into the library.
- Parameters
-
LibraryVariable Selection of internal variable according to Read/Write data via DC_RWData api. rw Select the operation mode: Mode of operation for DC_RWData api data A void pointer to the data to be written or read. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
Referenced by DB_InitCamera(), and Visualizza().
Here is the caller graph for this function:§ DC_SaveCameraConfig()
| int DC_SaveCameraConfig | ( | const char * | PathName, |
| config * | CameraConfig | ||
| ) |
Save camera configuration into a file.
- Parameters
-
PathName Specify the path of the camera configuration file. CameraConfig Pointer to config type variable.
- Returns
- 0 on succes or 1 if fail.
§ DC_SaveCCD()
§ DC_SavePlatform()
§ DC_Select()
| void DC_Select | ( | int | Camera | ) |
Select the camera to be used. This function selects the camera to be used (0 - 7), by selecting different FDL-PCI boards into the system. Many high level procedures have a specific parameter but for low level interations with the camera this procedure must be used.
- Parameters
-
Camera Select which camera will be used in following functions.
- Returns
- void
§ DC_SetBinning()
| void DC_SetBinning | ( | int | HorValue, |
| int | VerValue, | ||
| int | Camera | ||
| ) |
Set the horizontal and vertical binning value. This procedure accepts arbitrary values in the range between 1 to 16384. With an high binning value pattern generator may overflow.
- Parameters
-
HorValue Horizontal binning value, accept values in the range between 1 to max number of pixels of the selected CCD. VerValue Vertical binning value accepts values in the range between 1 to max number of pixels of the selected CCD. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
- See also
- DC_Status
Referenced by DB_InitCamera().
Here is the caller graph for this function:§ DC_SetBitDecimation()
| void DC_SetBitDecimation | ( | int | NumOfBit, |
| int | Camera | ||
| ) |
Change the number of bits of the A/D converter.
- Parameters
-
NumOfBit Change the value of A/D converter bit according to:
0 = 16 bit
1 = 15 bit
2 = 14 bit
3 = 13 bit
4 = 12 bit
Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
§ DC_SetDNR()
| void DC_SetDNR | ( | int | DNRValue, |
| int | Camera | ||
| ) |
Reduce camera noise with different levels.
- Parameters
-
DNRValue Set the value of the DNR according to:
0 = DNR disabled 1000 Kpix/s DR=12000
1 = 1st level, 786 Kpix/s DR=24000
2 = 2nd level, 562 Kpix/s DR=44000
3 = 3rd level, 330 Kpix/s DR>60000
Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
§ DC_SetFanSpeed()
| void DC_SetFanSpeed | ( | double | FanSpeed, |
| int | Camera | ||
| ) |
Procedure that allows you to set the speed of the fan cooler. Procedure that allows you to set the speed (%) of the cooler's fan currently used; its value is loaded in the power variable in a field ranging from 0 to 100.0; one decimal is accepted.
- Parameters
-
FanSpeed values in the range 0.0 to 100.0 Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
§ DC_SetFDLPCI()
§ DC_SetFilter()
| void DC_SetFilter | ( | int | Filter, |
| int | Camera | ||
| ) |
Procedure that places the wheel on a filter.
- Parameters
-
Filter Requested filter in the range 1 - 8. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
§ DC_SetFunction()
§ DC_SetFW()
| void DC_SetFW | ( | int | speed, |
| int | torque, | ||
| int | offset, | ||
| int | Camera | ||
| ) |
Procedure that loads the control parameters of the filter wheel.
- Parameters
-
speed of the the filter positioning, accept values in the range 0 - 39. torque of the filter holding when positioned, accept values in the range 0 - 3. offset of the filter, accept values in the range +/- 10. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
§ DC_SetGain()
| int DC_SetGain | ( | int | Gain, |
| int | Camera | ||
| ) |
Change the ratio between ADU and electrons. Procedure that allows you to set ccd gains, according to preset values in four various values.
- Parameters
-
Gain Preset value of the CCD gain in the range 0 - 3. Physical value can be found into ptf data. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- The absolute value of used gain, in the range 0 - 127.
Referenced by DB_InitCamera().
Here is the caller graph for this function:§ DC_SetMode()
§ DC_SetPathName()
| void DC_SetPathName | ( | char * | Path | ) |
Set the pathname for all dcl files.
- Parameters
-
Path Specify the path name, maximum 1024 chars.
Referenced by DB_InitCamera().
Here is the caller graph for this function:§ DC_SetPower()
| void DC_SetPower | ( | double | CoolerPower, |
| int | Camera | ||
| ) |
Procedure that allows you to set the cooler power. Procedure that allows you to set the power (%) of the cooler currently used; its value is loaded in the power variable in a field ranging from 0 to 100.0; one decimal is accepted.
- Parameters
-
CoolerPower values in the range 0.0 to 100.0 Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
Referenced by DB_InitCamera(), Task_CCD_Temp(), and Task_LIS_Temp().
Here is the caller graph for this function:§ DC_SetSerNum()
| void DC_SetSerNum | ( | U32 | SerialNumber, |
| int | Ext, | ||
| int | Camera | ||
| ) |
Procedure that writes the serial number of the camera.
- Parameters
-
SerialNumber 32 bit serial number, DTA internal code. Ext Extension code 0 = New code, -1 = Old code Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
§ DC_SetTemp()
| void DC_SetTemp | ( | double | TargetTemperature, |
| int | Scale, | ||
| int | Camera | ||
| ) |
Procedure that turns the camera cooler on and allows you to set an operative temperature of the CCD. The TargetTemperature variable is the temperature at which the ccd will have to work, while scale shows the measurement unity of the temperature. The TargetTemperature variable may also be expressed with decimals but it is important to remember that thermostatation precision is �0. �C. This procedure can only be used if the flag TEMPHANDLE is activated in the DC_Open.
Definitions of scales accepted:
KELVIN
CELSIUS
FAHRENHEIT
.
- Parameters
-
TargetTemperature is the temperature at which the ccd will have to work. Scale (Temperature scales). Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
Referenced by DB_InitCamera(), SetWindowsReset(), ShutCB(), Task_CCD_Temp(), and Task_LIS_Temp().
Here is the caller graph for this function:§ DC_SetUsrGain()
| void DC_SetUsrGain | ( | int | Gain, |
| int | Range, | ||
| int | Offset, | ||
| int | Camera | ||
| ) |
Procedure that allows you to set the ccd gain. Procedure that allows you to set the ccd gain. The values that can be loaded in the gain variable range from 0 to 127 for the CHROMA or from 0 to 63 for the other cameras. The range parameter can be 0 or 1 the offset parameter accepts a value which is digitally subtracted from the acquired image. To find the e- / ADU ratio the following formula must be applied:
Where:
ADR = Input range of the A/D convertor in volts.
BIT = Divisions of the A/D convertor (2n).
CCF = Charge Conversion Factor of the CCD expressed in uV.
GAIN = Gain factor used.
For A/D converters with 64 gains the gain factor can be obtained with the following formula:
Where N is a number included between 0 and 63.
The OFFSET parameter is a value that varies from 0 to 511 with a range from -300 mV a +300mV with the following codification:
1 +1.2 mv
255 +300 mv
256 0 mv
257 -1.2 mv
511 -300 mv
.
- Parameters
-
Gain Gain value in the range 0 - 63 Range A/D input range 0 - 1 Offset Offset control (0 - 511). Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
Referenced by DB_InitCamera(), E_SetCCDOffSet(), and edtCCDOffSet_CB().
Here is the caller graph for this function:§ DC_Shutter()
§ DC_ShutterControl()
§ DC_StartAcquisition()
| void DC_StartAcquisition | ( | int | mode, |
| int | Camera | ||
| ) |
Start the camera acquisition.
- Parameters
-
mode Specify the camera start mode. You can select the start by software or trigger mode (Acquisition starting mode). Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
- Warning
- If you are working with an arrays of camera, you can't access to the camera status while the acquisition is in progress.
§ DC_StartNow()
§ DC_Status()
| int DC_Status | ( | int | Camera | ) |
Return the status of the last operations performed on the camera. This procedure allows you to check the status of the last operations performed on the camera.
- Parameters
-
Camera Specify on which FDL-PCI will be used for this operation, range 0 - 7. Set to 0 if you don't use the FDL-PCI interface.
- Returns
- The status (Error Codes) of the operation performed:
- See also
- DC_ErrorMessage
Referenced by DB_InitCamera(), and ShutCB().
Here is the caller graph for this function:§ DC_StopNow()
§ DC_SubSelect()
| void DC_SubSelect | ( | int | Camera, |
| int | subcamera | ||
| ) |
Select which camera, linked to the multiplexer, will be used. By means of this function it's possible to control each camera linked with the multiplexer.
- Parameters
-
Camera Specify on which FDL-PCI operation will be performed. Range 0 - 7. subcamera Specify which multiplexer channel will be enabled. Range 0 - 3.
- Returns
- void
§ DC_TempCalib()
| void DC_TempCalib | ( | double | kto, |
| double | kt, | ||
| int | Camera | ||
| ) |
Calibrate temperature sensor. First generation of iCAM camera doesn't have internal temperature sensor calibration. This procedure provides the calibration of this device.
- Parameters
-
kto Offset value. Nominal value 0.0 kt Span value. Nominal value 1.0 Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
§ DC_TemperatureHandle()
§ DC_TGetCCD()
| void DC_TGetCCD | ( | int | Mode, |
| double | Exposure, | ||
| U16 * | mat, | ||
| int | Camera | ||
| ) |
Get an image at full resolution. The same procedure as DC_FGetCCD as far as parameters are concerned , but with a basic difference : the DC_FGetCCD can carry out a synchronization on an external event (TRIGGER) with a software sampling while keeping the clear CCD active. As a result, from the time the trigger event gets started, the following image can have several ten millisecond delay (according to both the PC and the camera) and it can not be reproduced from an image to the following one. On the other hand, this procedure also shows a way to synchronize the image shooting by means of the external trigger which can have a jitter up to a few ten nonosecond. The background has to be deactivated.
- Parameters
-
Mode If it is set to 0 it performs a dark shot.; to 1 it takes an image. Exposure Exposure time expressed in seconds. mat Linear array where an image is memorized. The array mat must be dimensioned according to: dx x dy x 2. If this parameter is setted to MAT_NULL or if you have selected MEMALLOC in TaskSettings parameter of DC_Open (or equivalent), the image will be loaded into the internal selected buffer. Camera Specify on which FDL-PCI initialization it will be performed. If FDL-PCI is not used, this parameter is ignored. Range 0 - 7.
- Returns
- void
- See also
- DC_GetWinCCD, DC_FGetCCD, DC_TGetCCD, DC_FGetWinCCD, DC_Kinetics, DC_Status, DC_GetCCDPulsed, DC_GetWinCCDPulsed, DC_Kinetics, DC_KineticsCCD.
- Note
- This procedure is iCAM/iCAM II specific
§ DC_Trigger()
§ DC_Ver()
| int DC_Ver | ( | char * | LibraryVersion | ) |
Return the library version. Procedure returning the number of the revision of the library. This procedure provides the library revision according to two different formats: as an integer (through the return code), or as a string. By passing a pointer in the parameter, this can be a NULL if you do not want to make the most of this mode. The return code is an integer thus codified: 110 is 1.1.0.
- Parameters
-
LibraryVersion Pointer to allocated string of 80 characters.
- Returns
- An integer thus codified: 110 is 1.1.0
Referenced by AboutCB().
Here is the caller graph for this function: